OCT eye fundus image data registration method
A fundus image and data matching technology, applied in image data processing, image enhancement, image analysis, etc., can solve problems such as doping non-rigid transformation, and achieve the effect of large image accuracy and efficiency improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0126] In the following, the present invention will be further described in combination with experiments, and the present invention will be compared with the classic iterative closest point method to verify its accuracy and robustness.
[0127] The computer configuration used in the experiment is Intel Core E7500 dual-core CPU, the main frequency is 2.93GHz, the memory is 1GB×2 DDR2, the operating system is Microsoft Windows Win7 Sp1 flagship version, and the algorithm implementation platform is MicrosoftVisual Studio 2010.
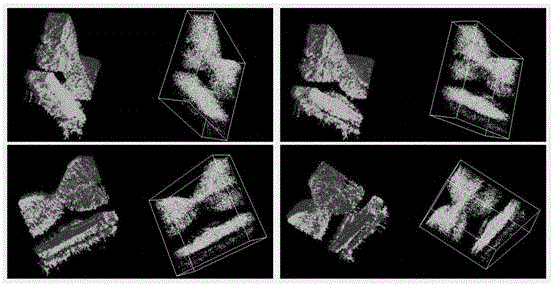
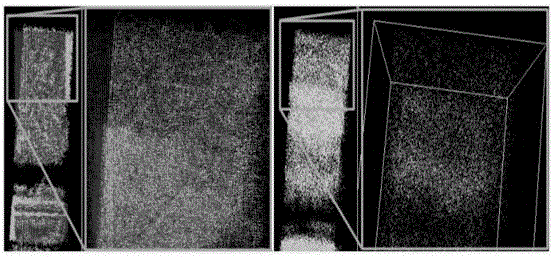
[0128] In order to evaluate the registration performance of the algorithm, the algorithm of the present invention uses two fundus optical tomography images as experimental data, which are adjacent parts of the human retina structure. The overlap of the two datasets is approximately 75 x 500 x 375 voxels. image 3 The registration process of point cloud data is shown from four different perspectives. The left area of the picture shows the initial positi...
Embodiment 2
[0133] In addition, the present invention uses the registration error to evaluate the registration accuracy of the algorithm, and uses the time consumption length to evaluate the registration efficiency of the algorithm. The registration error represents the percentage of the number of points that failed to match corresponding points in the registration process to the total number of point cloud points, and it has the following calculation form
[0134]
[0135] where Success(P A ,Q B ) is defined as
[0136]
[0137] In the above formula, N represents the number of corresponding point pairs involved in the calculation. (P A ,Q B ) represents a pair of corresponding points. Success(P A ,Q B ) is used to represent the corresponding point pair (P A ,Q B ) registration results. If the Euclidean distance between the corresponding point pairs after registration is less than the given threshold δ, it means that the corresponding point pair registration is successful,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com