Simultaneous positioning and map building method
A technique for map construction and relocation, applied in the field of robust camera tracking, capable of solving problems such as violations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
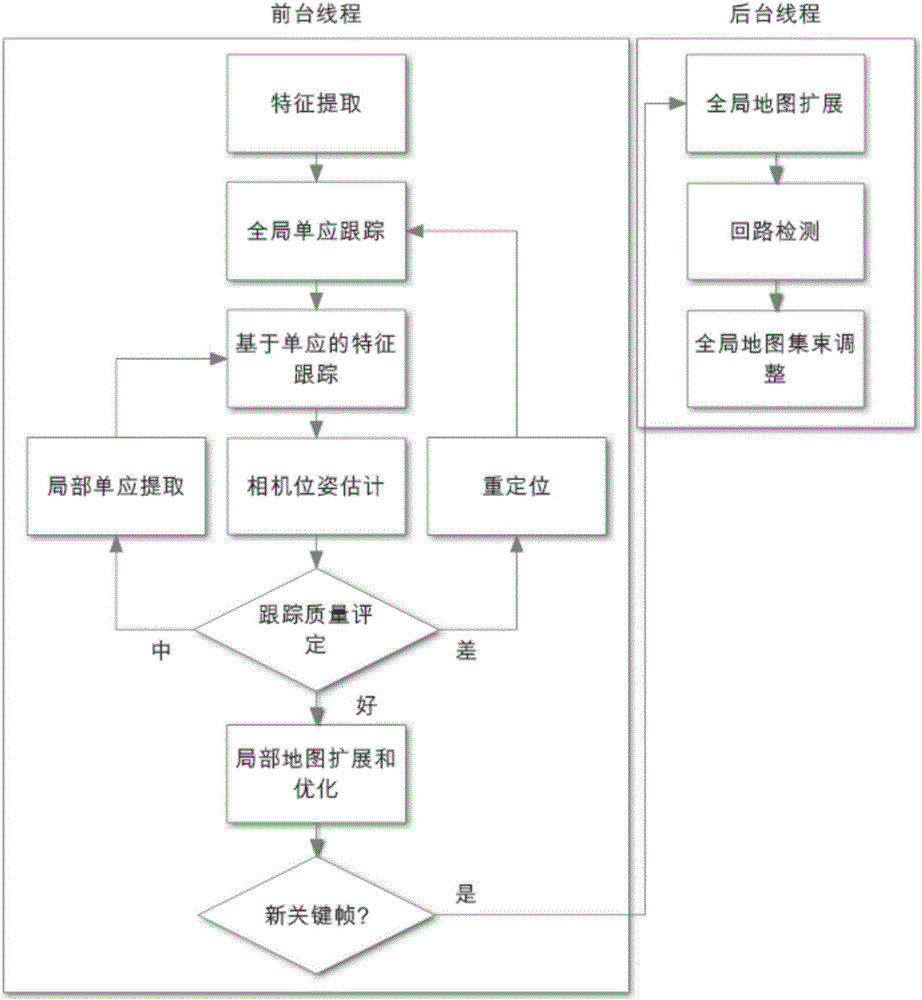
[0059] The invention discloses a simultaneous positioning and map construction method, which can reliably deal with strong rotation and fast movement, thereby ensuring a good experience of augmented reality. In this method, a new multi-homography based feature tracking method is first proposed, which is efficient and robust under strong rotation and fast motion. Based on this, a real-time local map expansion strategy is proposed, which can triangulate the 3D points of the scene in real time. In addition, a sliding window-based camera orientation optimization framework is proposed, using simulated or actual IMU data to add a priori motion constraints between consecutive frames.
[0060] Before introducing this method in detail, first introduce the convention of the mathematical formula of this method (same as R. Hartley and A. Zisserman. Multiple view geometry in computer vision. Cambridge university press, 2004). Scalars are represented by italic characters (such as x), matri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com