A hull traversing method and a hull traversing robot
A technology for robots and hulls, applied in instruments, control/adjustment systems, vehicle position/route/height control, etc., can solve the problems of robots deviating from cleaning paths, visual errors, and inability to traverse the hull, so as to improve traversal efficiency and save labor. cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
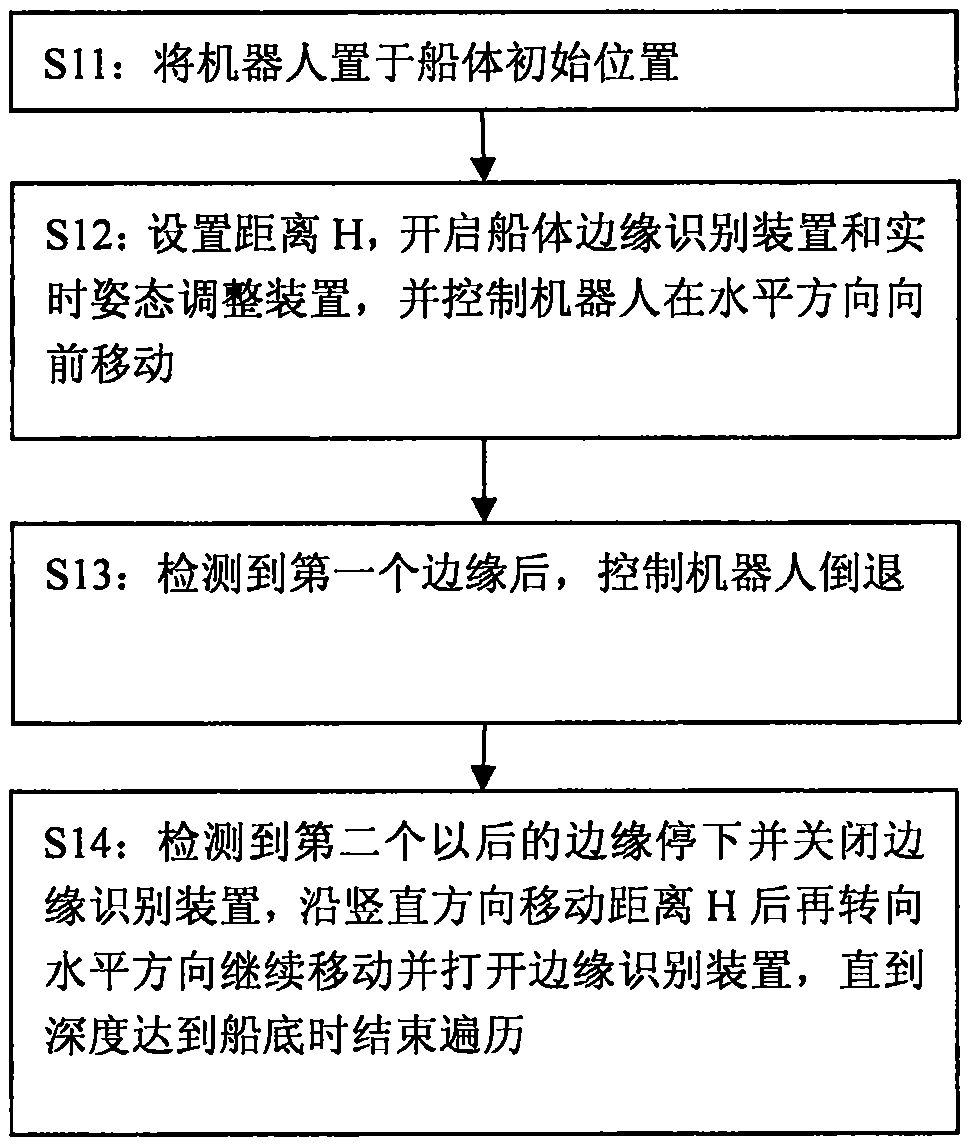
[0026] figure 1 A flowchart showing a method for traversing a hull of an exemplary embodiment. The hull traversal method can be used to detect the surface condition of the hull, clean the hull, apply materials on the surface of the hull, and the like. Such as figure 1 As shown, the method includes:
[0027] Step S11, placing the robot at the initial position of the hull;
[0028] In a possible implementation, the robot is manually placed in the area to be cleaned on the hull, such as the upper left, upper right, lower left or lower right, without strict requirements on the specific position, and the distance between the two sides and the edge of the hull is less than One-tenth of the body length. The robot can also be automatically placed on the area of the hull to be cleaned by a mechanical device.
[0029] Step S12: Set the distance H, turn on the hull edge recognition device and the real-time attitude adjustment device, and control the robot to move forward in the ho...
Embodiment 2
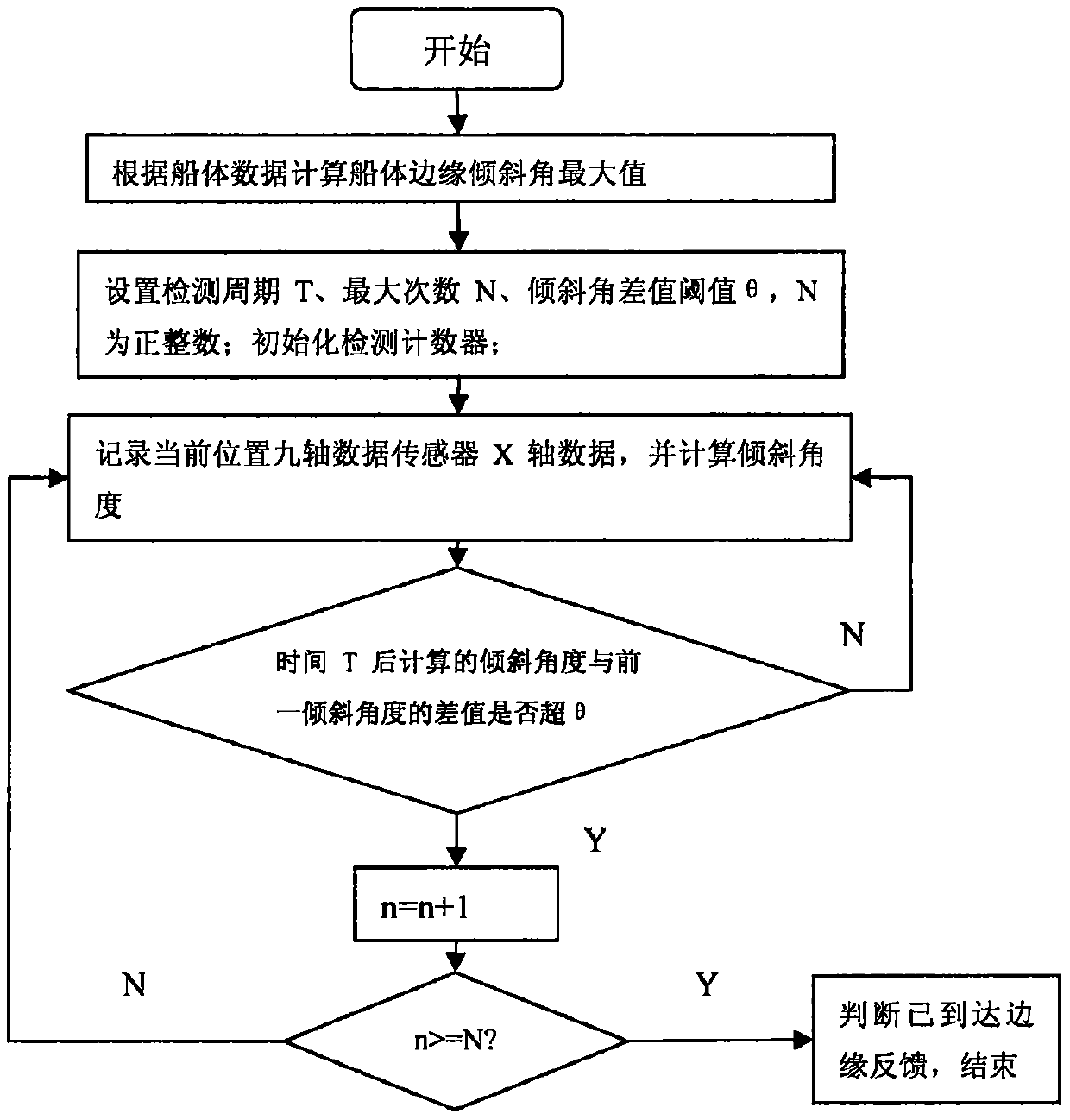
[0041] Figure 5 It is a block diagram of a hull edge recognition device 50 according to an exemplary embodiment, and the hull edge recognition device 50 includes: an inclination angle calculation module 51 , a first setting module 52 , and a first judging module 53 .
[0042] The tilt angle calculation module 51 is configured to calculate the maximum value of the hull edge tilt angle according to the hull data;
[0043] The first setting module 52 is configured to set the detection period T, the maximum number of times N, and the tilt angle difference threshold θ, where N is a positive integer;
[0044] The first judging module 53 is configured to judge that the edge of the hull has been reached when the number of times N is detected every two times when the difference in inclination angle is greater than θ is detected.
[0045] With the hull edge recognition device provided in the present disclosure, multiple consecutive detections are used to judge whether the hull edge ha...
Embodiment 3
[0047] Figure 6 is a block diagram of a real-time posture adjustment device 60 according to an exemplary embodiment, and the real-time posture adjustment device 60 includes: an offset threshold calculation module 61 , a second setting module 62 , a detection module 63 , and a second judging module 64 .
[0048] The offset threshold calculation module 61 is configured to calculate the maximum allowable offset threshold W according to the width of the robot and the width of the cleaning surface;
[0049] The second setting module 62 is configured to set the detection period T, and detect the depth after moving the distance H each time in the vertical direction and set it as the initial depth D;
[0050] The detection module 63 is configured to detect the current depth D1, and calculate the absolute value of D1 and D;
[0051] The second judging module 64 is configured to judge the relationship between the absolute value and W, and calibrate the pose of the robot when the absol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com