Transformer station inspection robot control system and method based on Android platform
A technology for inspection robots and control systems, applied in general control systems, control/regulation systems, electrical program control, etc., can solve problems such as simple control functions, poor scalability, and poor software portability, and achieve high real-time performance and improved Intelligent and portable level, the effect of convenient close-range control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0063] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
[0064] It should be understood that the substation inspection robot in this patent is a typical electromechanical product, including mechanical parts and control parts. The focus of this patent is on the improvement of the control system of the substation inspection robot. The pan-tilt module is used as the control object. Under the condition of satisfying the system reliability connection, those skilled in the art should know its connection mode and specific working mode. Relevant knowledge is easy to ascertain.
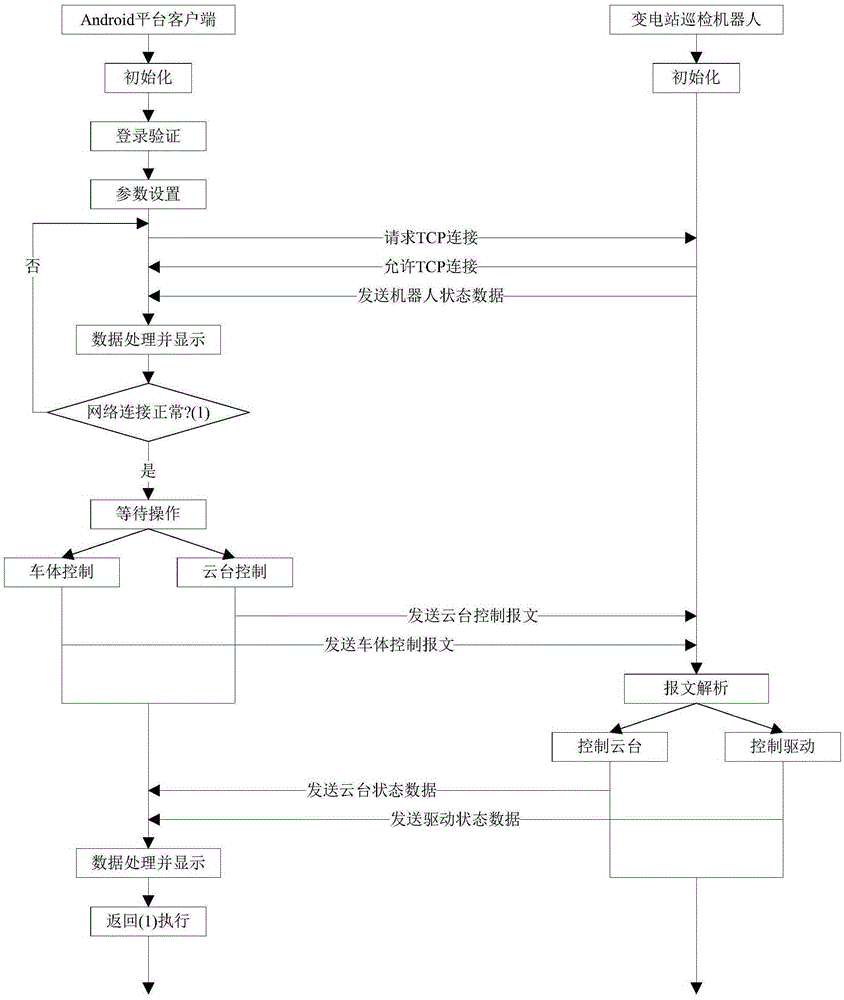
[0065] The embodiment of the present invention provides a substation inspection robot control system based on the Android platform, such as figure 1 As shown, it includes an Android platform client 1, a substation PC server 2, a substation inspection robot 3, a wireless communication module 4, and a wireless communication module 5.
[0066] The A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com