General end effector for brake pad carrying robot
An end effector and robot technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of low success rate, unfavorable suction cup adsorption requirements, large dust in the working environment, etc., and achieve the effect of improving applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings.
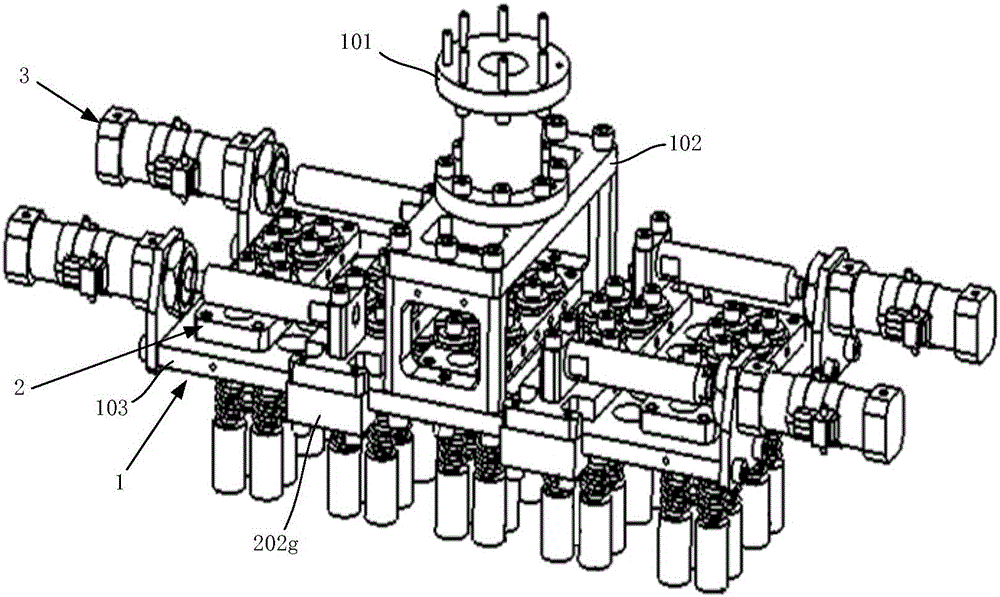
[0033] The universal end effector of the robot for handling the brake pads of the present invention includes an actuator body 1 and a pick-up mechanism 2, such as figure 1 shown.
[0034] The actuator body 1 includes an I-shaped flange seat 101 , a flange support frame 102 and a pick-up mechanism mounting plate 103 . Wherein, the flange support frame 102 is an inverted U-shaped support frame composed of a top plate and two side plates. The middle part prevents the support frame 102 from interfering with the pick-up mechanism 2 installed on the pick-up mechanism mounting plate 103 . The fixed end of the I-shaped flange seat 101 is installed on the top plate of the inverted U-shaped flange support frame 102, and the other end is a connecting end for connecting with the robot.
[0035] The pick-up mechanism 2 includes an electromagnet mounting plate 201 and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com