Humanoid robot trunk structure
A humanoid robot and torso technology, applied in manipulators, joints, manufacturing tools, etc., can solve problems such as complex structures of highly redundant joints, and achieve the effects of no complex components, simple structure, and diverse motion postures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
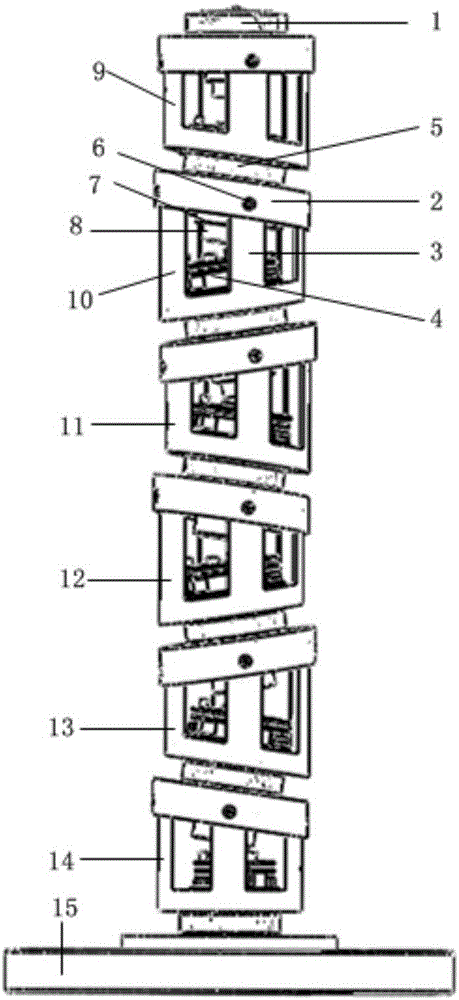
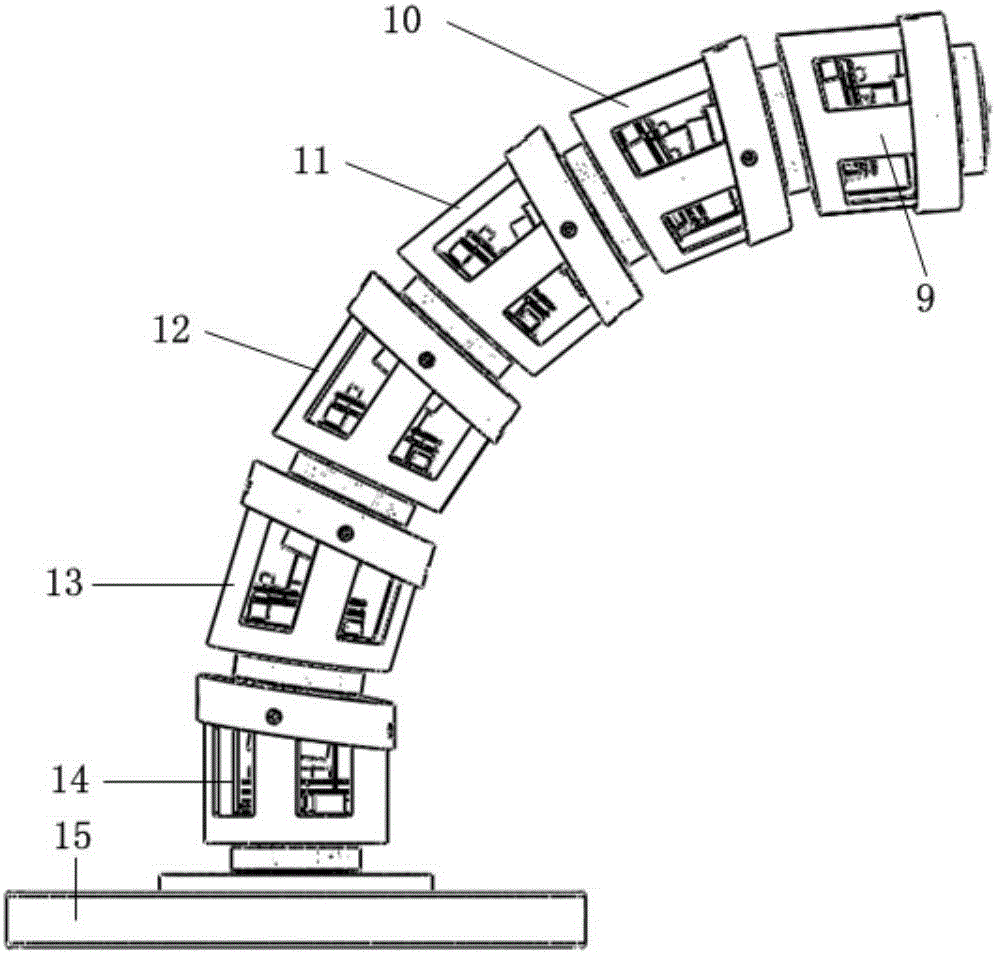
[0023] Such as figure 1 and figure 2 As shown, the torso structure of the humanoid robot in this embodiment has six subunits and a waist unit, and the six subunits are respectively the first subunit 9, the second subunit 10, the third subunit 11, and the fourth subunit 12. The fifth subunit 13 and the sixth subunit 14 as the final stage, the waist unit 15 is a waist rotation unit. In order to make the movement characteristics of the whole torso structure stable, each sub-unit is set as a cylindrical shell with a height of 111mm and a diameter of 100mm. The top and bottom surfaces of the cylindrical shell are set as symmetrical slopes. The inclined plane refers to the symmetrical plane with the horizontal plane as the center of symmetry, and the inclined plane is 8.5° from the horizontal plane. This structural form makes the cylindrical shell in the symmetrical two sides, one side is the short side, and the other side is the long side. side.
[0024] Motors, encoders and dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com