Method and device used for marking object
A technology of objects and target objects, applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve the problems of complex and changeable scenes, easy to ignore the situation of flanking scenes, and inability to effectively make evasive responses, so as to achieve the purpose of assisting driving Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
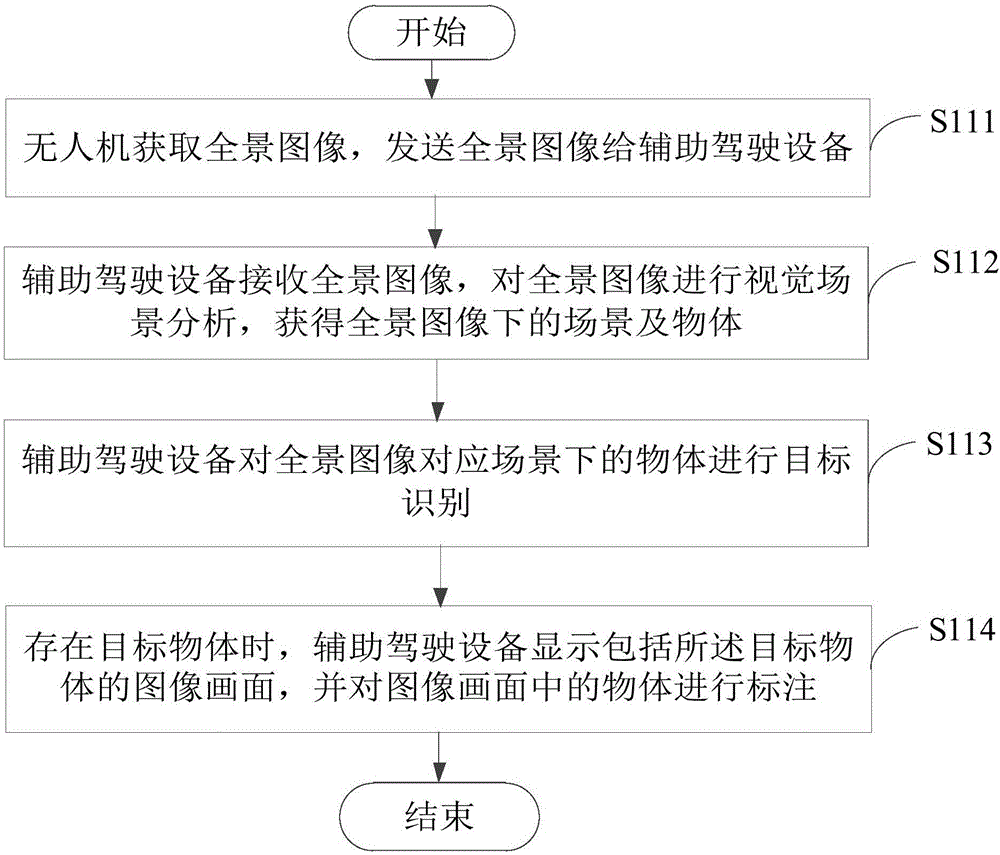
[0051] Please refer to image 3 , image 3 It is a flow chart of the method for marking objects provided by the first embodiment of the present invention, and the method is applied to the UAV 100 and the auxiliary driving device 200 connected to each other through communication. The specific flow of the method for labeling objects will be described in detail below.
[0052] Step S111 , the UAV 100 acquires a panoramic image, and sends the panoramic image to the driving assistance device 200 .
[0053] In this embodiment, the UAV 100 can collect panoramic images around the UAV 100 by setting two panoramic optical cameras. Specifically, the installation positions of the two panoramic optical cameras may be opposite, so as to realize image collection without dead angles. In this embodiment, preferably, one of the panoramic optical cameras is set on one side of the propeller of the UAV 100 for capturing images of the sky, and the other panoramic optical camera is set on the bel...
no. 2 example
[0068] Please refer to Figure 4 , Figure 4 It is a flow chart of the method for marking objects provided by the second embodiment of the present invention, and the method is applied to the auxiliary driving device 200 connected to the UAV 100 in communication. The specific flow of the method for labeling objects will be described in detail below.
[0069] Step S121 , receiving the panoramic image captured by the UAV 100 .
[0070] Specifically, after the UAV 100 obtains the panoramic image through the panoramic optical camera, it transmits the data of the panoramic image to the driving assistance device 200 .
[0071] Step S122, performing visual scene analysis on the panoramic image to obtain scenes and objects under the panoramic image.
[0072] In this embodiment, the driving assistance device 200 uses a neural network algorithm of deep learning to perform visual scene analysis on the panoramic image to obtain scenes and objects under the panoramic image.
[0073] Whe...
no. 3 example
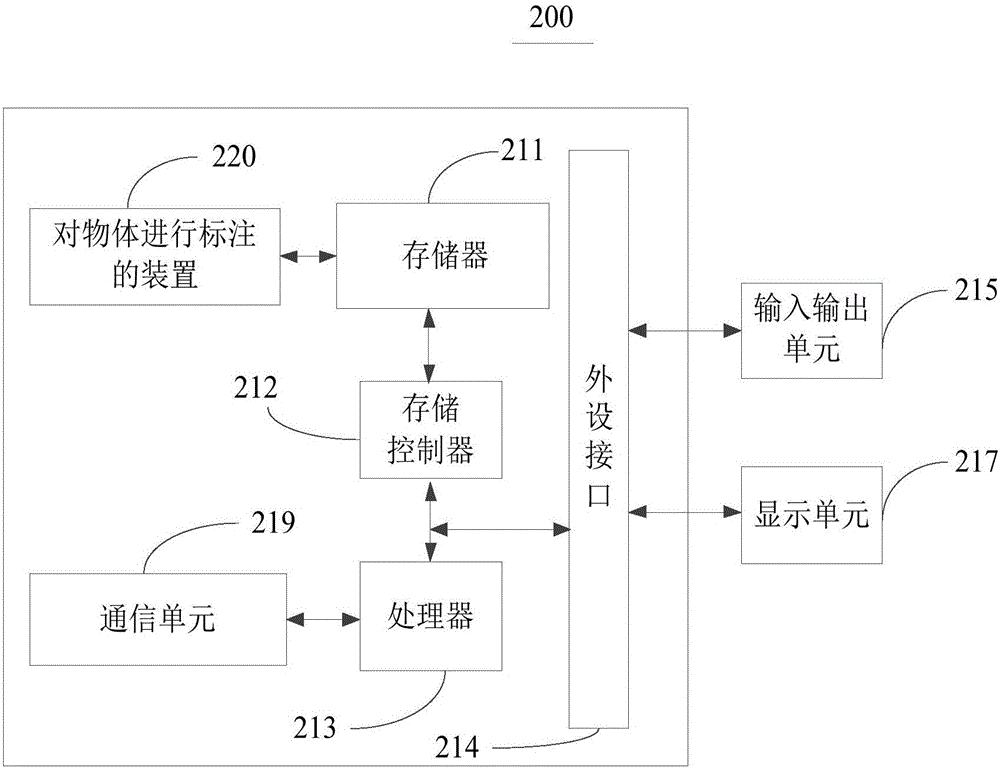
[0080] Please refer to Figure 5 , Figure 5 An apparatus 220 for marking objects is provided according to the third embodiment of the present invention, and the apparatus is applied to the driving assistance device 200 communicatively connected with the UAV 100 . The device 220 includes: a receiving module 2201 , a visual scene analysis module 2202 , an object recognition module 2203 and a display module 2204 .
[0081] The receiving module 2201 is used for executing step S121 in the second embodiment, for receiving the panoramic image acquired by the UAV 100 .
[0082] The visual scene analysis module 2202 is used for executing step S122 in the second embodiment, for performing visual scene analysis on the panoramic image to obtain scenes and objects under the panoramic image. The visual scene analysis module 2202 uses a neural network algorithm based on deep learning to analyze the received panoramic image to obtain scenes and objects under the panoramic image.
[0083] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com