Method for recognizing gait of thigh amputation subject
A technology for gait recognition and residual limbs, applied in medical science, sensors, diagnostic recording/measurement, etc., can solve problems such as lack of road condition recognition methods, lag in walking pattern recognition results, and inability to coordinate movements between humans and machines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0066] The gait recognition method of the thigh stump person of the present embodiment, aiming at a total of 10 steps of the stairs, the height of the first step is 15cm, and the road condition of the slope angle is 10° for walking pattern recognition, and the flat experiment is carried out in a wide outdoor corridor .
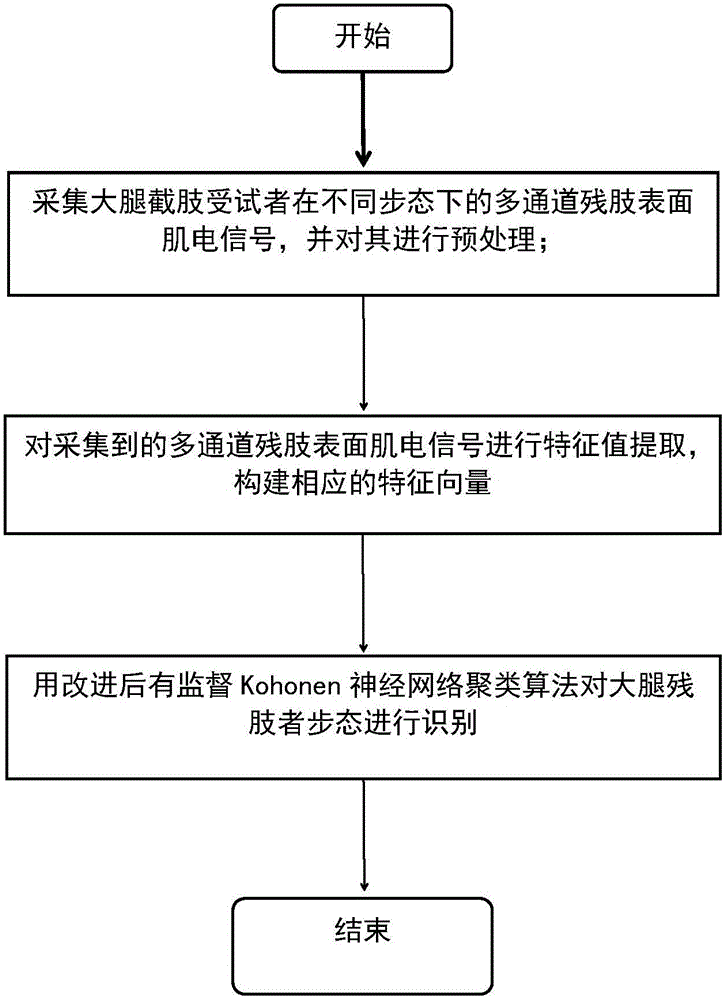
[0067] Specific steps are as follows:
[0068] The first step is to collect the multi-channel residual limb surface electromyography signals of the thigh amputee subjects in different stances and preprocess them:
[0069] Choose one amputation below the thigh, wear artificial limbs for more than 3 years, have experience in installing artificial limbs and have good control over the artificial limbs, have not undergone strenuous exercise within 24 hours without muscle fatigue, weigh 45-80kg, and have residual limbs 15 patients with a circumference ratio between 80% and 95% were 12 males and 3 female amputees as thigh amputee subjects, and the muscles on the sur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com