Control method for wearable unmanned plane control equipment based on motion sensing
A technology of control equipment and control method, applied in the field of aviation flight, can solve the problems of complex operation, high operator requirements, and difficulty in getting started.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
[0061] The control method of the somatosensory-based wearable UAV control device provided by the present invention comprises the following steps:
[0062] S1: The microprocessor on the ground side collects the data of the attitude sensor;
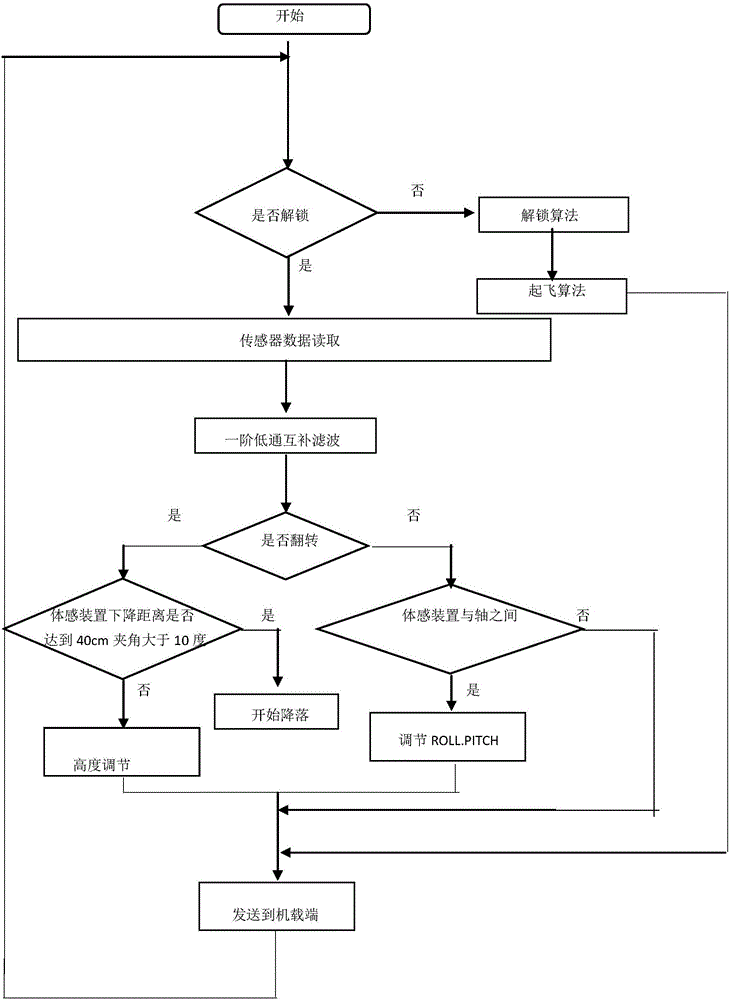
[0063] S2: further processing the collected data to obtain hand movement information;
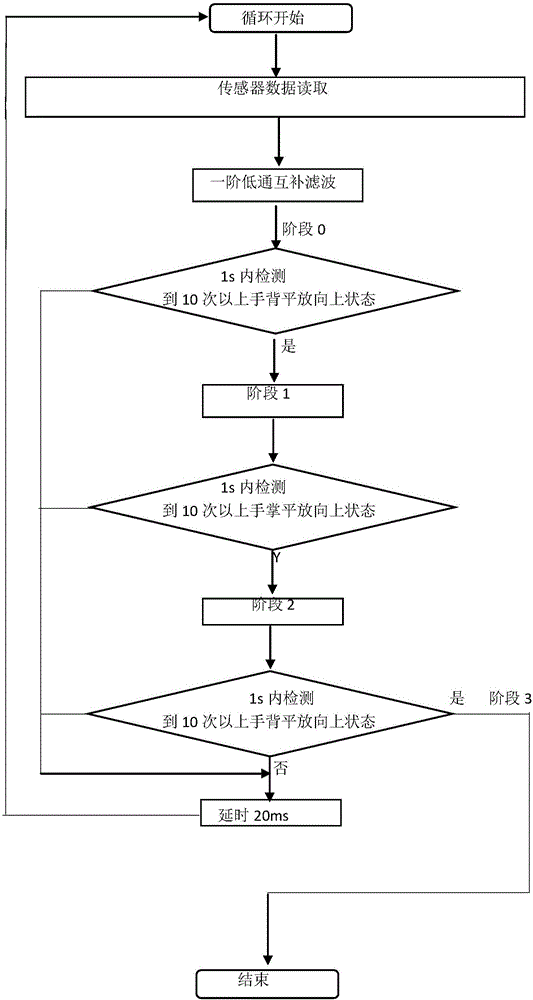
[0064] S3: Use the hand movement information to judge and recognize the hand posture through the algorithm;
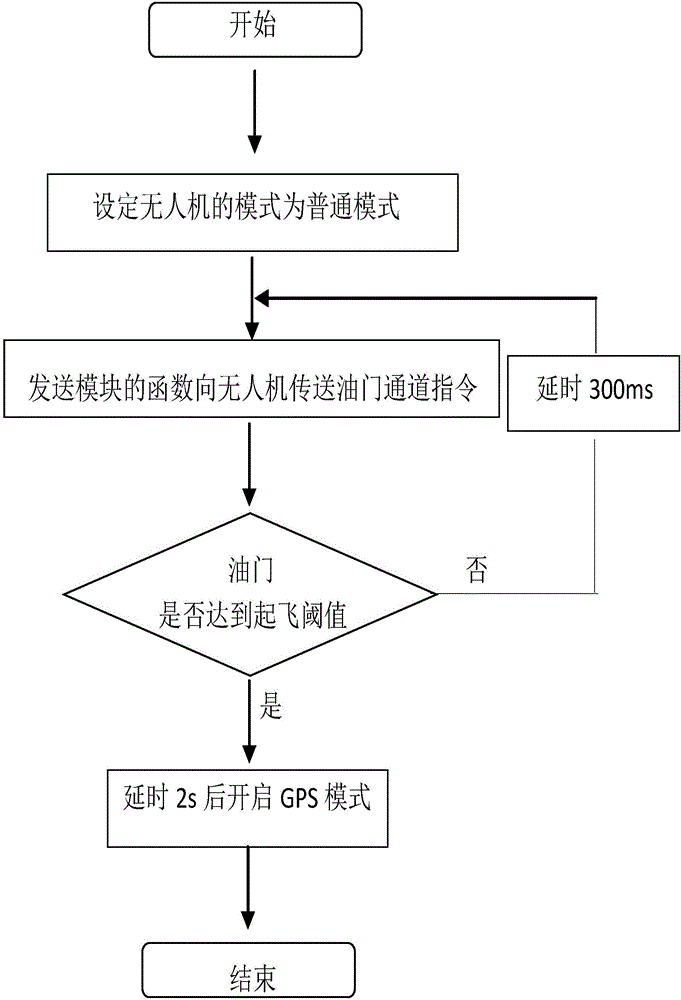
[0065] S4: converting the recognized gesture information of the hand into a control instruction;
[0066] S5: Send the control command to the on-board microprocessor through the wireless communication module;
[0067] S6: The on-board microprocessor encodes the control command into a PPM or PWM signal, and sends it to the input...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com