Nerve self-adaption fault-tolerant control method for train unknown perturbation
A fault-tolerant control and self-adaptive technology, applied in self-adaptive control, general control system, control/regulation system, etc., can solve problems such as train impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
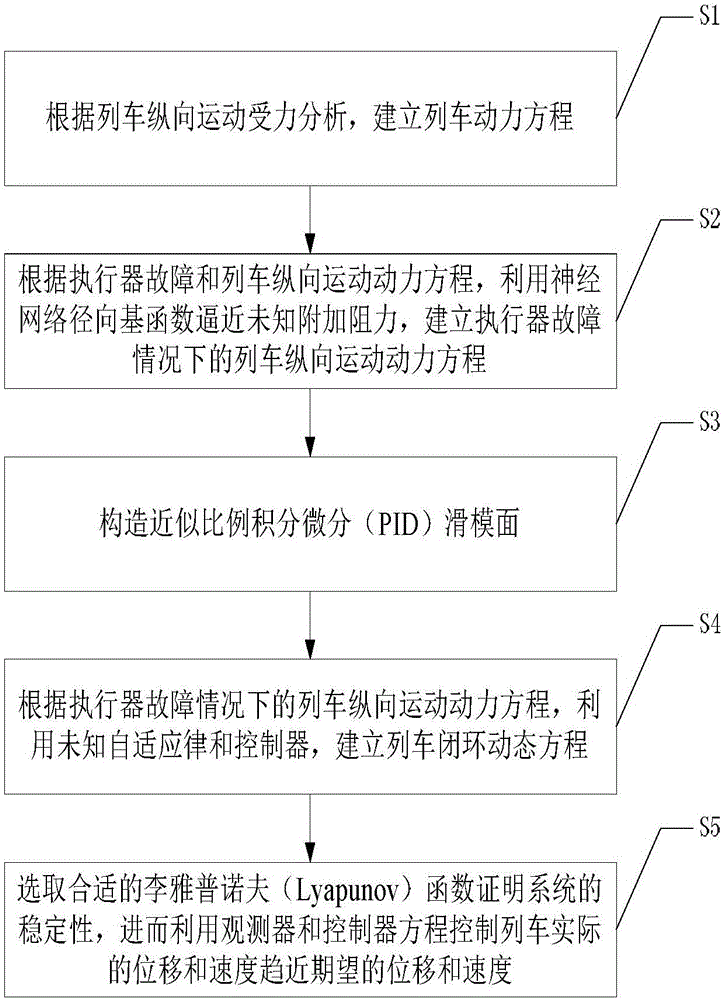
[0078] The compound control method based on the failure of the train actuator provided in this embodiment is used in the position and speed tracking control when the train actuator fails, such as figure 1 As shown, the method includes the following steps:
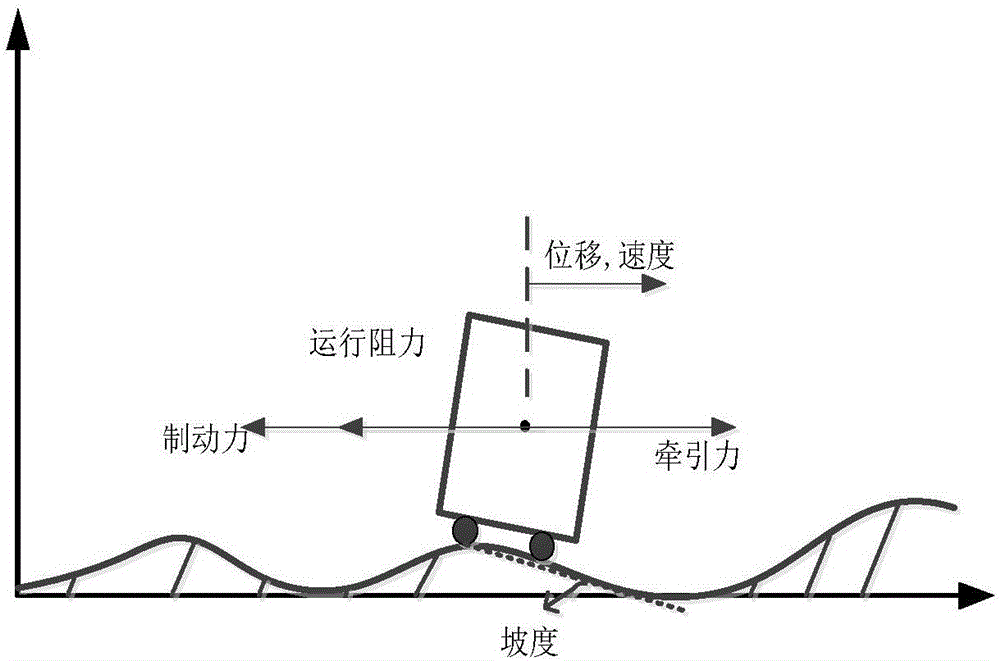
[0079] S1. Carry out force analysis on the longitudinal motion of the train, and establish the dynamic equation of the longitudinal motion of the train;
[0080] S2. According to the actuator fault and the dynamic equation of the longitudinal motion of the train, the radial basis function of the neural network is used to approximate the unknown additional resistance, and the dynamic equation of the longitudinal motion of the train under the actuator fault is established;
[0081] S3, constructing an approximate proportional-integral-derivative (PID) sliding mode surface;
[0082] S4. According to the train longitudinal motion dynamic equation under the condition of the actuator failure, the closed-loop dynamic equation of ...
Embodiment 2
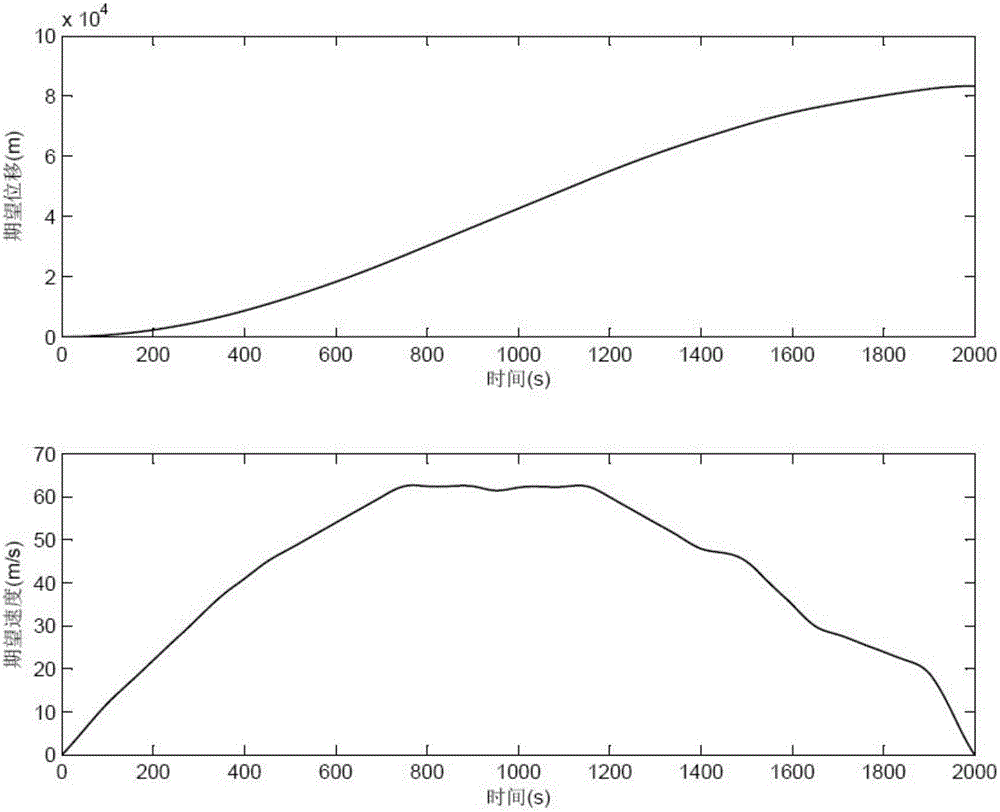
[0134] In order to verify the effectiveness of the neural adaptive fault-tolerant control method based on the unknown disturbance of the train provided in this embodiment, MATLAB is used for simulation experiment verification, and a detailed description is given.
[0135] The train single-mass model provided in this embodiment comprehensively considers the impact of unknown actuator faults and additional resistance on the train position and speed tracking performance, and adopts a neural adaptive fault-tolerant controller with an approximate PID sliding surface to make the closed-loop system asymptotically stable. Good position and speed tracking performance, good robustness to faults, and good suppression to unknown disturbances.
[0136] In the simulation experiment, the total length of the train running distance is 83.355 kilometers, and the total mass of the train is m=5×105 kg, gravitational acceleration g=9.8 N / kg, slope angle θ=rand(0,5), total tunnel length l s = 1000 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com