Vision localization landing tail end-based unmanned aerial vehicle landing method
A visual positioning and unmanned aerial vehicle technology, applied in computer parts, three-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of not being able to land multiple aircraft at the same time, and achieve good promotion prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
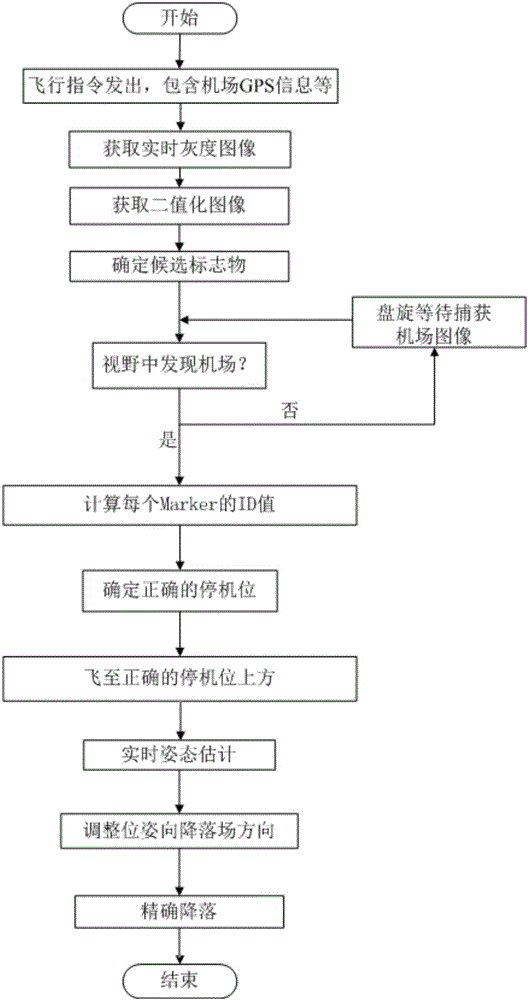
[0045] In accordance with the above technical solution, as shown in the accompanying drawings, the present invention provides a method for landing a drone based on visual positioning of the landing end, including the following steps:
[0046] Step 1: Build a Drone Airport
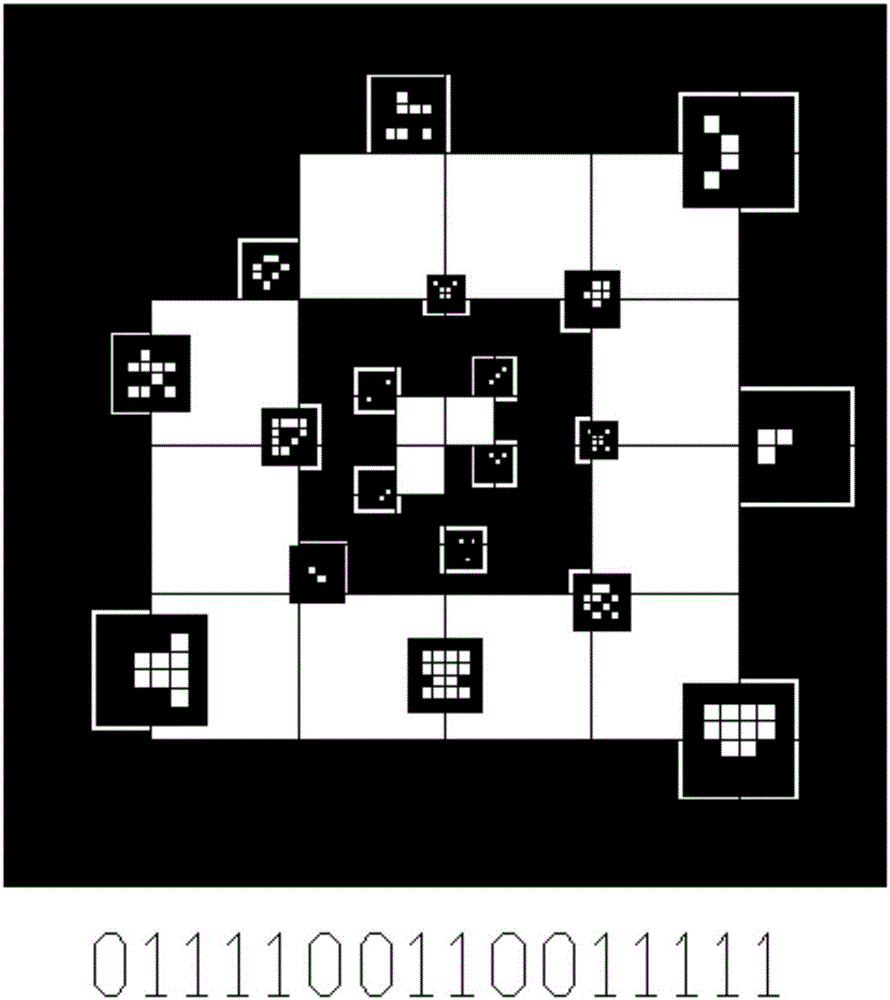
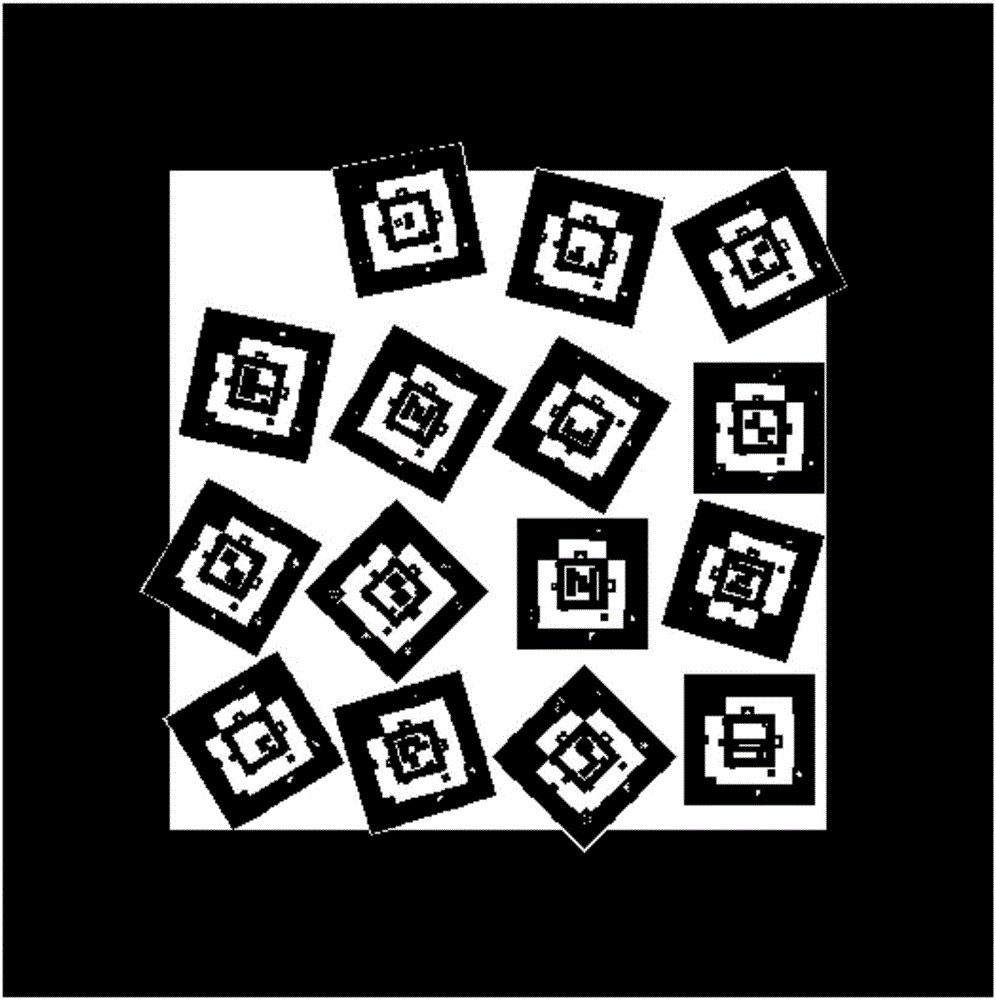
[0047] The UAV airport of the present invention is made up of a plurality of Markers (other iconic landmarks can also be used), and each parking stand Marker has distinctive features, and can carry out binary coding through light and dark stripes, and can Obtain its ID information; the UAV obtains the parking position Marker in the field of view through the airborne image device, calculates and verifies the ID of each parking position Marker through binary coding, and performs fitting with the corresponding three-dimensional point in the global coordinate system Compute pose to get a good estimate of your own position for precise landing.
[0048]The parking position Marker is a square structure composed o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com