Control method for multi-degree-of-freedom master-slave teleoperation manipulator
A control method and manipulator technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as fatigue-prone operation efficiency and heavy mental burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
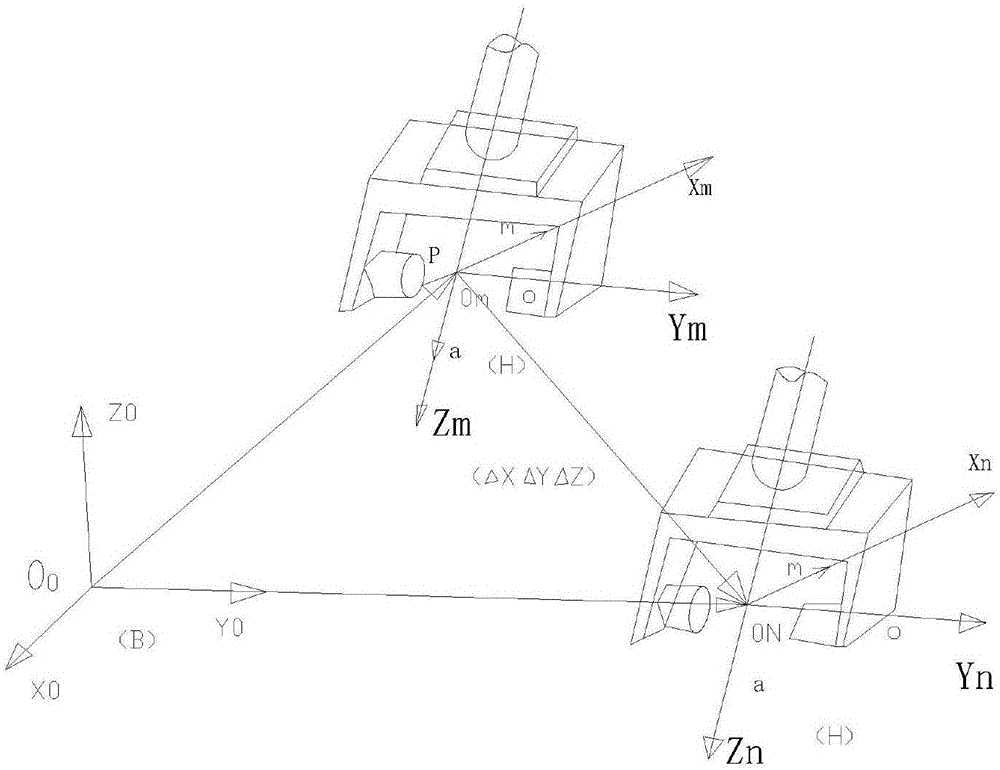
[0030] figure 1 and figure 2 A specific embodiment of the invention is shown in which figure 1 It is a schematic flow chart of the method of the present invention; figure 2 It is a geometric diagram of the change in space position of the multi-degree-of-freedom manipulator in the present invention.
[0031] See figure 1 and figure 2 , a method for controlling a multi-degree-of-freedom master-slave teleoperated manipulator, comprising the following steps:
[0032] Step A, from the manipulator on site, according to the method of forward kinematics, the attitude matrix is determined with the current angle of each joint as a parameter;
[0033] Step B, judging the grab target point (X, Y, Z) or the direction of X, Y, Z according to the actual target image or video, without considering the target posture;
[0034] Step C, manually setting the route track grasped by the mechanical arm;
[0035] Step D, setting the interpolation point, that is, the step length of each mov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com