Unmanned aerial vehicle (UAV)-unmanned ground vehicle (UGV) combined formation cooperative control method
A collaborative control and unmanned aerial vehicle technology, applied in the direction of vehicle position/route/height control, control/regulation system, non-electric variable control, etc., can solve large steady-state error, slow convergence speed, poor formation stability and reliability And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
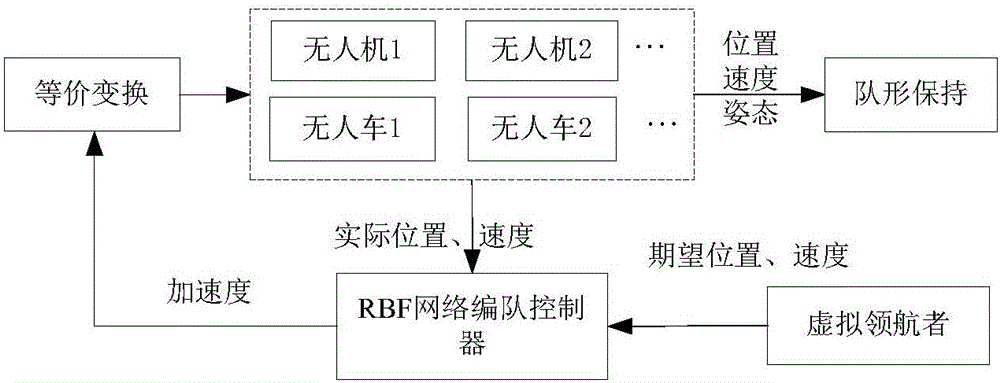
[0055] The invention proposes a design method of an adaptive formation controller based on RBF network. like figure 1 As shown, the equivalent transformation of the nonlinear dynamic model of the UAV and the unmanned vehicle is deduced in detail, and a unified formation control model with acceleration as the control input is established. Using the virtual leader method, the error model between the virtual UAV and the following UAV is established, and an adaptive controller for UAV-UV joint formation based on the RBF network is designed, and the sigmoid function and the tanh function are used online Adjust the network weights so that the tracking error of the formation quickly approaches zero. Specifically include the following steps.
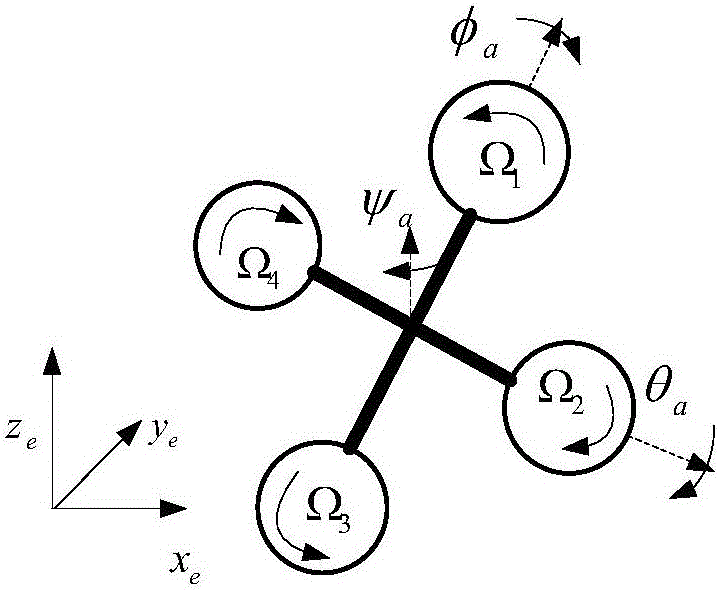
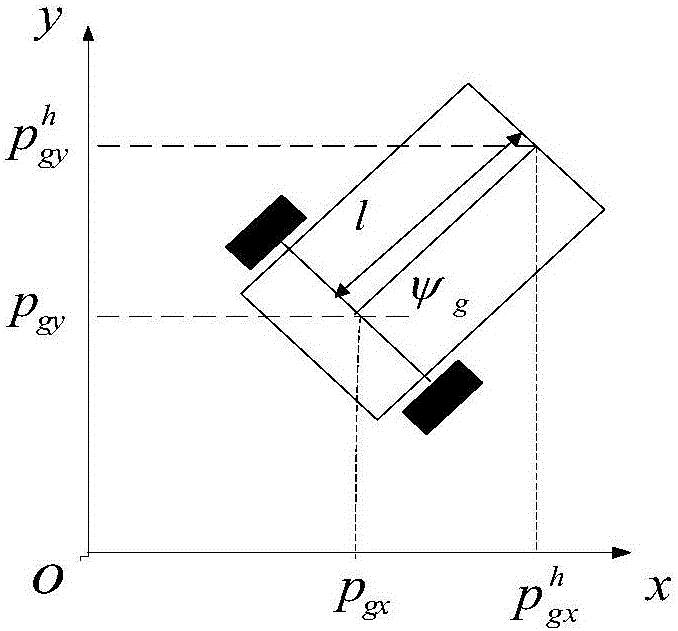
[0056] 1. First establish the nonlinear dynamic model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com