Multi-underwater-vehicle self-adaptive fuzzy bipartite consistency control method based on event triggering mechanism
An underwater vehicle, self-adaptive fuzzy technology, applied in the direction of self-adaptive control, combustion engine, general control system, etc., can solve the problems of shortening the service life of the actuator, mechanical wear and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
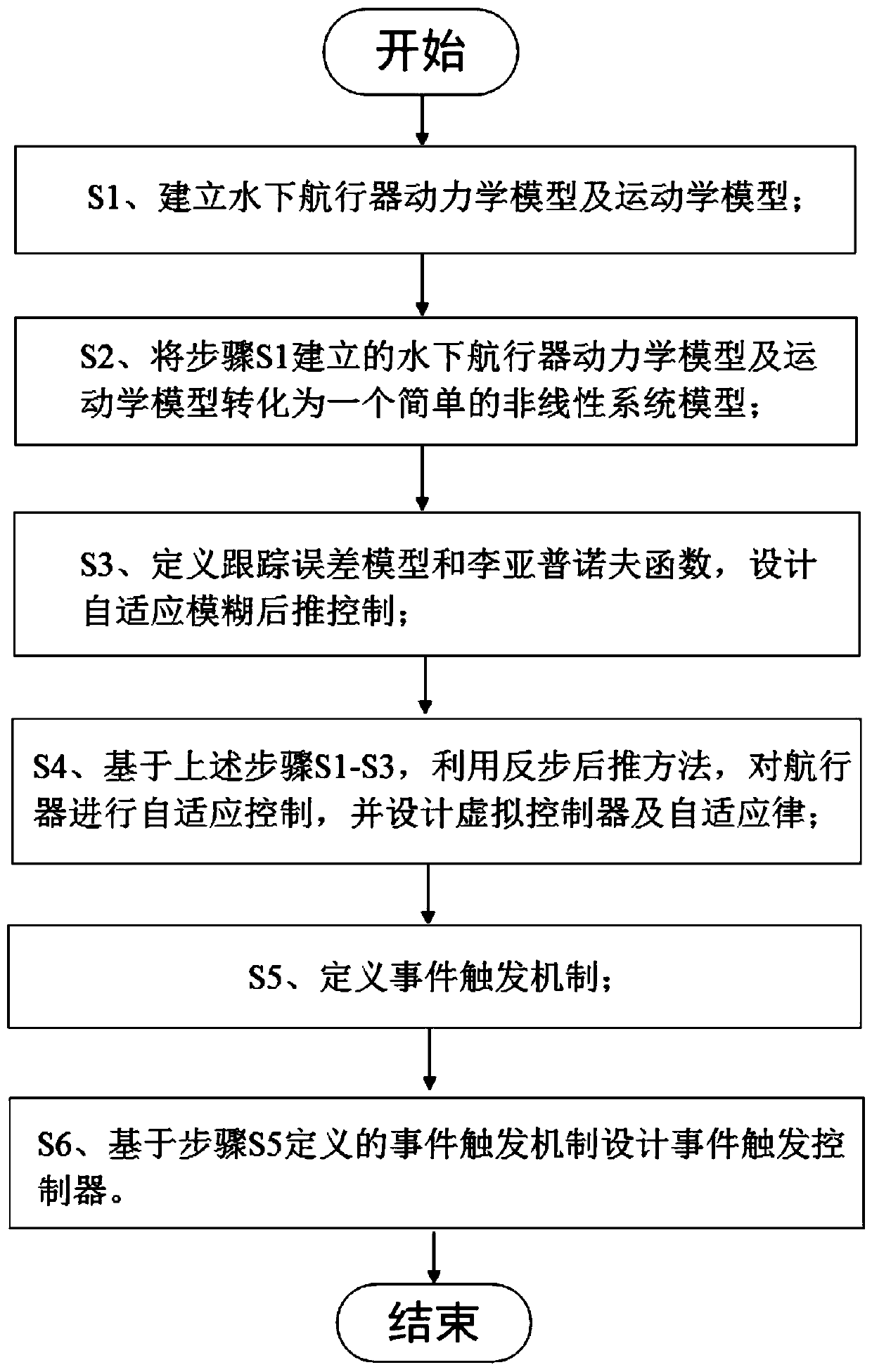
[0080] Such as figure 1 As shown, the present invention provides a kind of multi-underwater vehicle self-adaptive fuzzy bipartite consistent control method based on event triggering mechanism, comprises the following steps:
[0081] S1. Establish the dynamic model and kinematics model of the underwater vehicle;
[0082] The underwater vehicle dynamics model and kinematics model established in the step S1 are as follows:
[0083]
[0084]
[0085] where i∈N, Represents the position vector, by the Euler angle Φ i =[φ i ,θ i ,ψ i ] T Depict the pose vector; v i =[u i ,v i ,w i ] T Indicates the translation velocity vector, M i =diag{m i1 ,m i2 ,m i3} represents the inertia matrix, m ij >0;D i (v i )=diag{d i1 , d i2 , d i3} represents the damping matrix, represents the restoring force vector, τ i =[τ ui ,τ vi ,τ wi ] T ∈R 3 represents the control force vector, Indicates resilience, S i Indicates gravity, K i Indicates buoyancy, j=1,2,3;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com