Multi-rotor unmanned aerial vehicle self-adaptive landing method and system
A technology of multi-rotor drones and drones, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve the problems of limited effects, crashes, bombings, and control without coordination and coordination of the landing state Algorithms and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
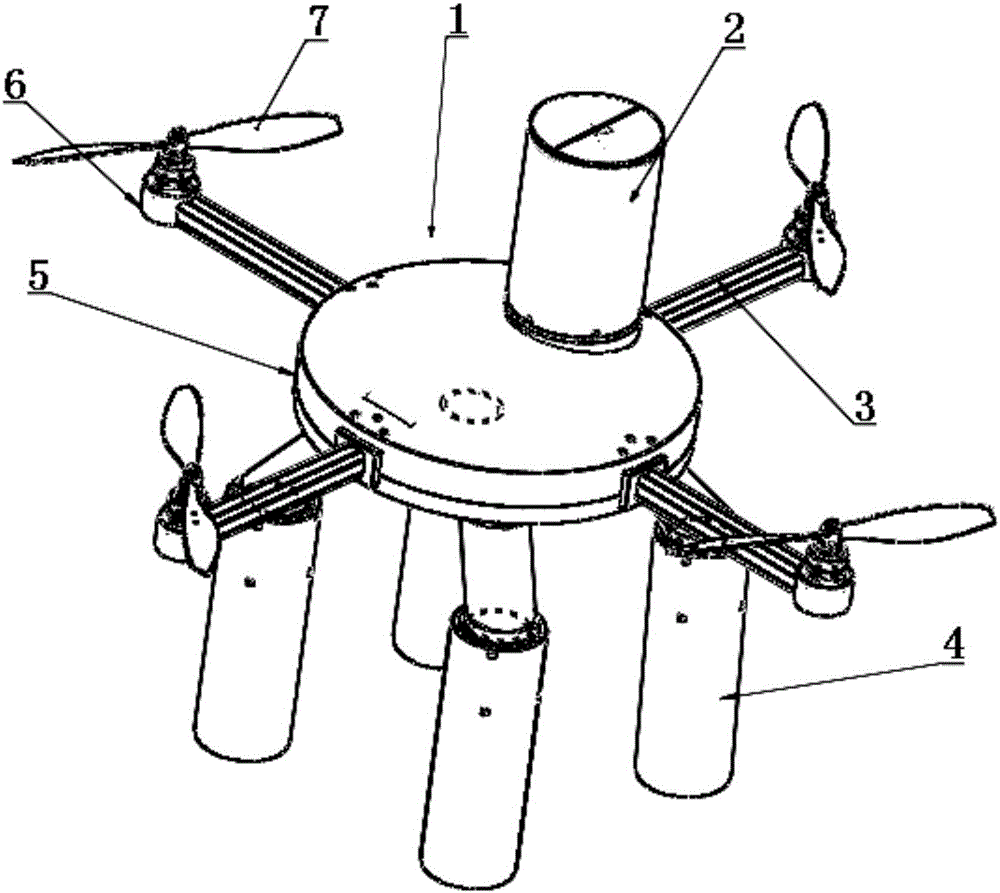
[0069] The present invention uses images taken by UAVs at different positions in the sky to determine several landing areas. After the UAV completes the task, it selects the nearest landing area and the best path to implement adaptive landing, and uses the designed retractable landing gear to reduce the impact on landing. The real-time out-of-control monitoring provided for UAVs can effectively and safely land in normal landings and emergency landings, protecting UAVs and their onboard electronic equipment.
[0070] In order to make the technical solutions and advantages of the present invention clearer and easier to understand, the technical solutions in the embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0071] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0072] see figure 1 , The multi-rotor UAV provided by the prese...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com