Indoor robot SLAM method and system
An indoor robot and robot technology, applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of not being the best choice and the absence of SLAM methods, etc., to achieve small appearance structure restrictions, high real-time performance, and small amount of calculation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
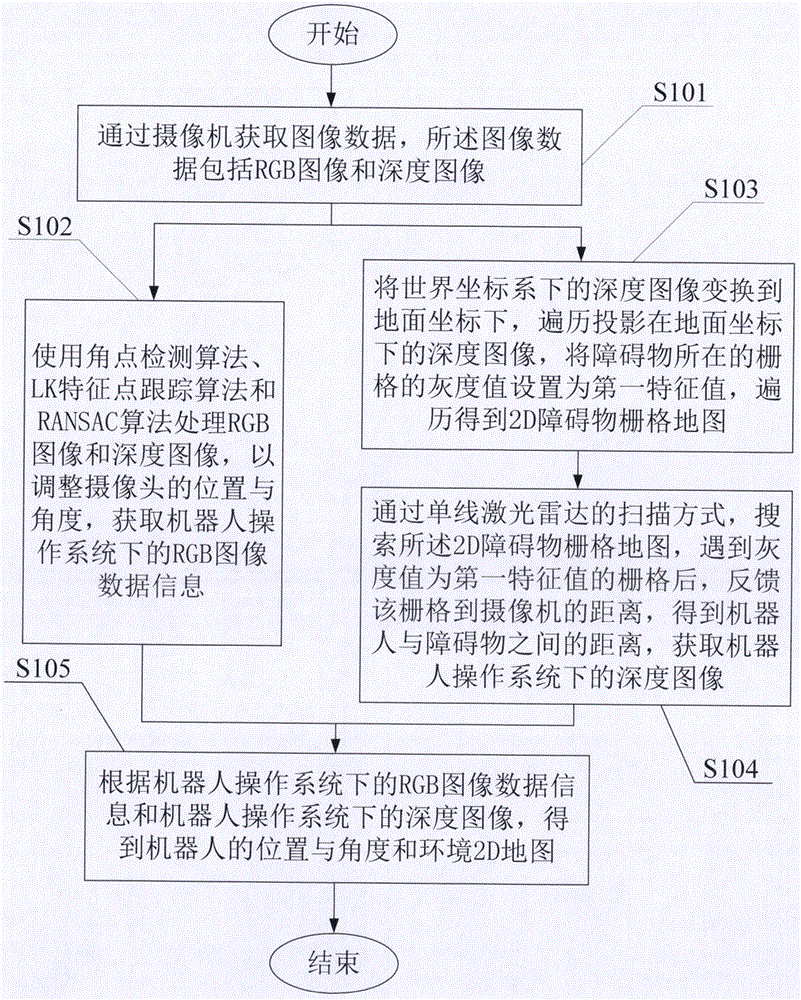
[0066] like figure 1 As shown, a SLAM method for an indoor robot is disclosed in this embodiment, and the method includes:
[0067] S101. Obtain image data through a camera, where the image data includes an RGB image and a depth image;
[0068] S102, use the corner point detection algorithm, the LK feature point tracking algorithm and the RANSAC algorithm to process the RGB image and the depth image, to adjust the position and angle of the camera, and obtain the RGB image data information under the robot operating system;
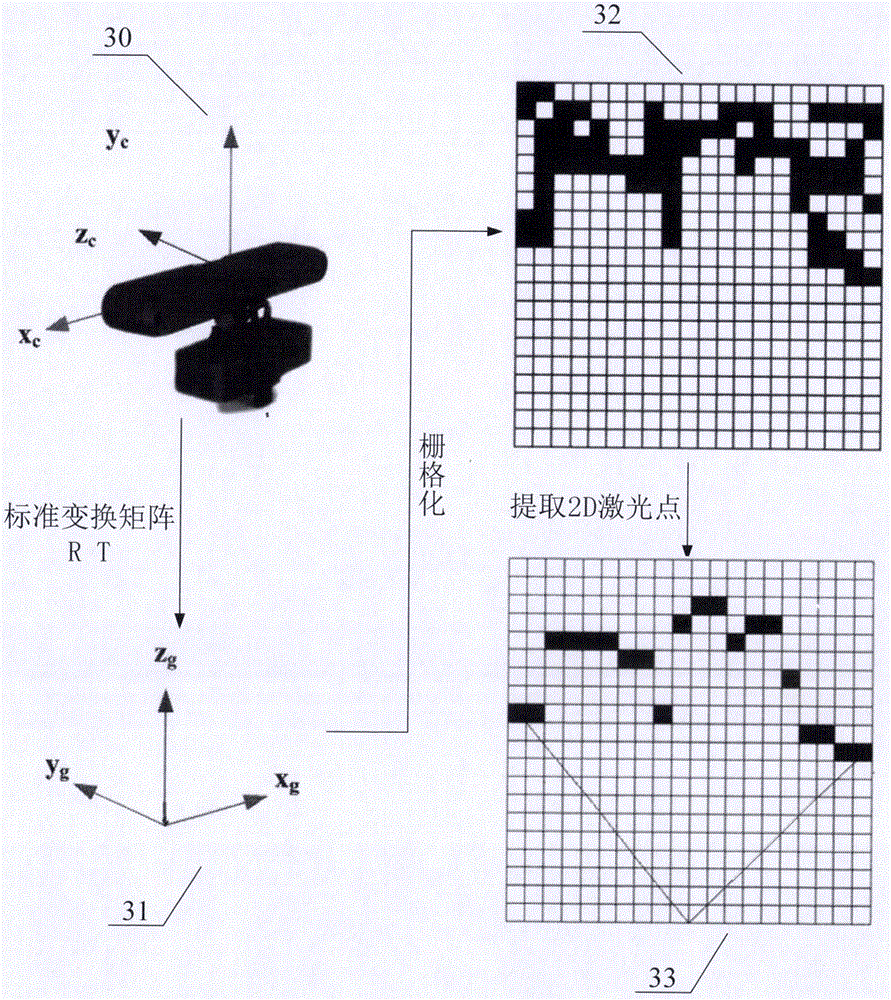
[0069] S103. Transform the depth image in the world coordinate system to the ground coordinate, traverse the depth image projected in the ground coordinate, set the gray value of the grid where the obstacle is located as the first eigenvalue, and traverse to obtain a 2D obstacle grid grid map;
[0070] S104. Search the 2D obstacle grid map through the single-line laser radar scanning method, and when encountering a grid whose gray value is the first eigen...
Embodiment 2
[0098] like Figure 4 As shown, the present invention also discloses a SLAM system for an indoor robot, the system comprising:
[0099] An acquisition module 201, configured to acquire image data through a camera, the image data comprising an RGB image and a depth image;
[0100] The RGB image processing module 202 is used to process RGB images and depth images using corner detection algorithm, LK feature point tracking algorithm and RANSAC algorithm to adjust the position and angle of the camera and obtain RGB image data information under the robot operating system;
[0101] The grid module 203 is used to transform the depth image in the world coordinate system to the ground coordinate, traverse the depth image projected in the ground coordinate, set the gray value of the grid where the obstacle is located as the first eigenvalue, and traverse Get a 2D obstacle grid map;
[0102] The depth image processing module 204 is configured to search the 2D obstacle grid map through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com