A multi-stage rotating telescopic mechanical arm
A technology of mechanical arms and mechanical arms, applied in the directions of manipulators, claw arms, joints, etc., can solve the problems of large volume and complex structure, and achieve the effect of reliable transmission, simple and compact structure, and high rotation precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
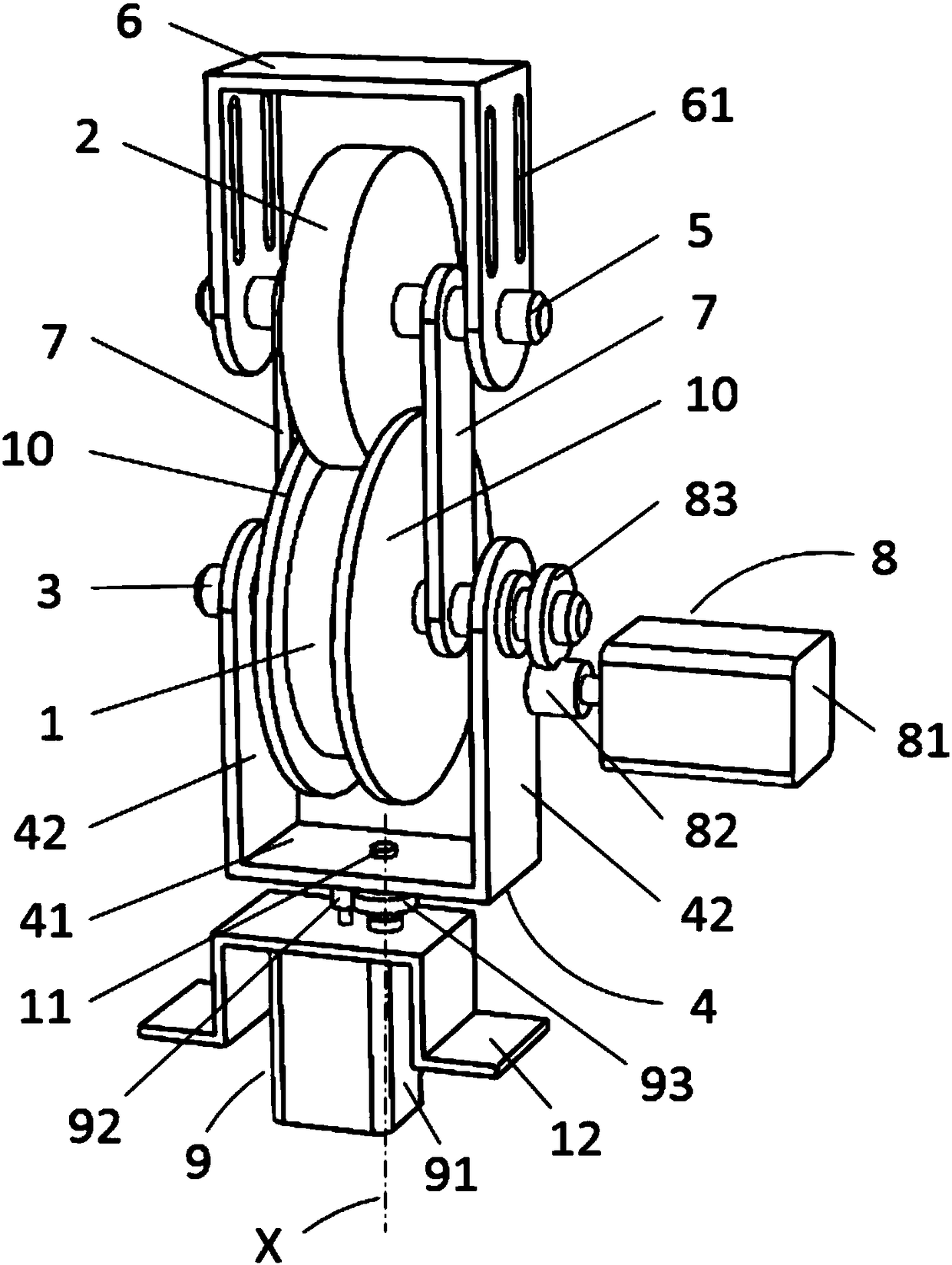
[0021] A kind of multi-stage rotary telescopic mechanical arm of the present invention, such as figure 1 and figure 2 As shown, it includes the meshing first gear 1 and the second gear 2, the two ends of the first gear 1 are respectively provided with baffles 10, and the baffles 10 are higher than the tooth tops of the first gear 1, and the second gear 2 To the limit function; the first gear 1 is installed on the first rotating shaft 3, and is connected with the first support 4 through the first rotating shaft 3, and the second gear 2 is installed on the second rotating shaft 5, and passes through the second rotating shaft 5 is connected to the second bracket 6, and a connecting arm 7 is provided between the first rotating shaft 3 and the second rotating shaft 5; the first bracket 4 includes a bottom plate 41 and two side plates 42 respectively arranged at both ends of the bottom plate 41, and the first rotating shaft 3 The two ends are respectively connected to the two side...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com