Method for locating a sound source, and humanoid robot using such a method
A sound source localization and sound source technology, applied in the field of humanoid robots, can solve problems such as reverberation sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
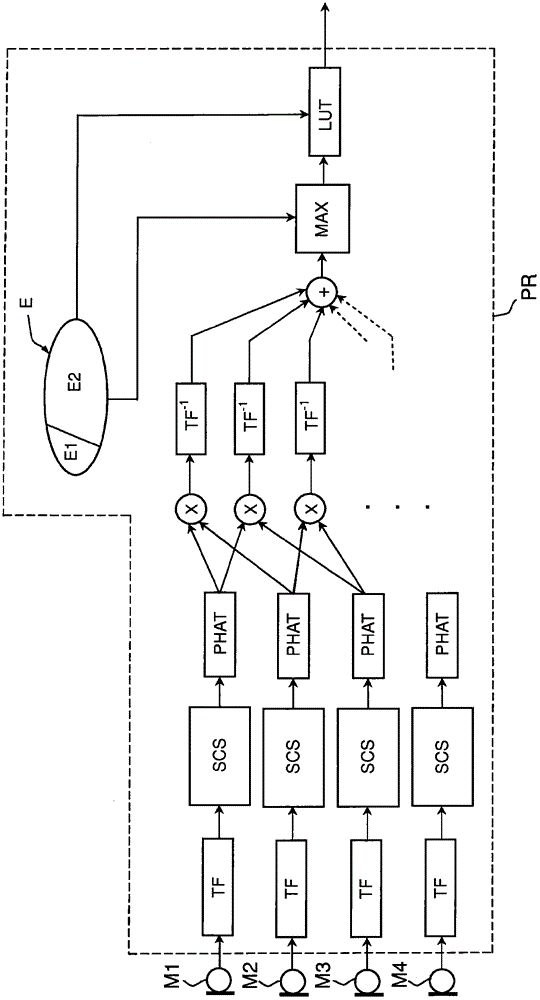
[0041] figure 1 Very schematically shown is the implementation of a method according to an embodiment of the invention by means of a system comprising a network of microphones M1-M4 and a processor PR.
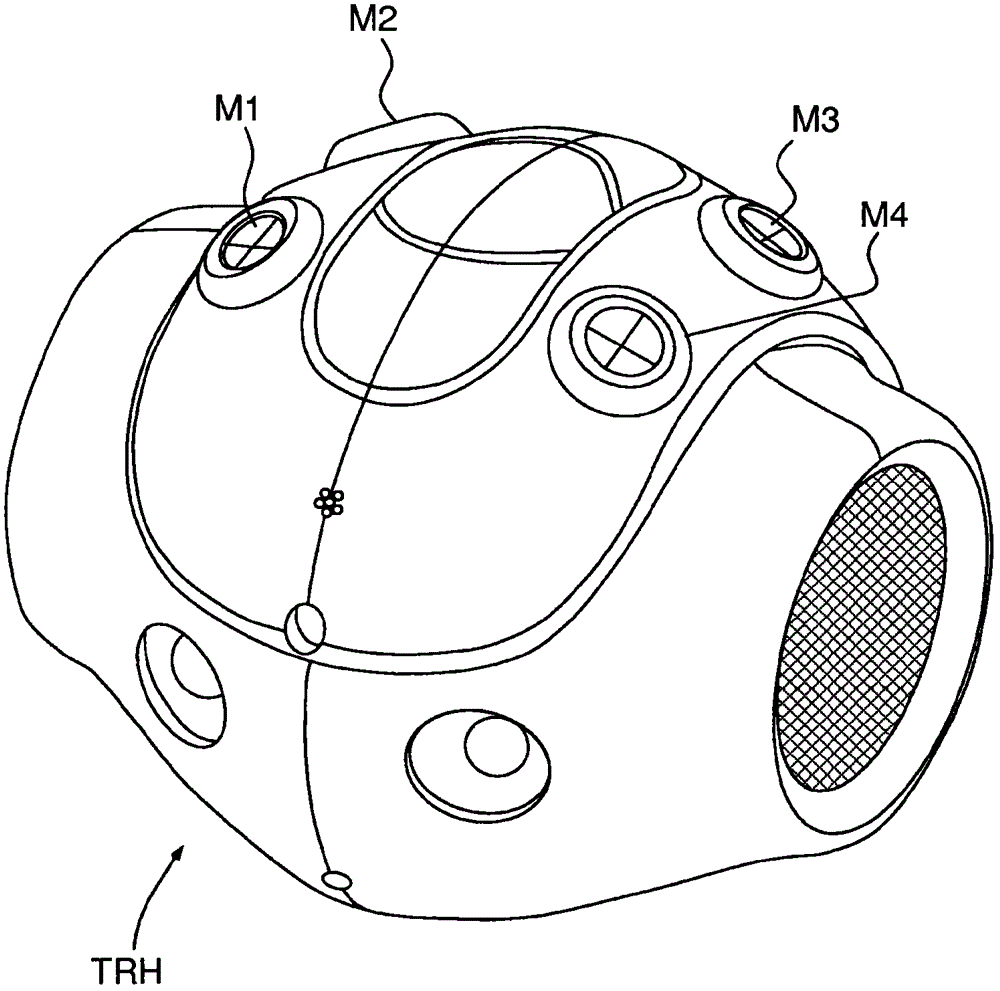
[0042] In the illustrated case, the network includes four microphones, but the number could be smaller (at least three) or larger; also, although the microphones are shown aligned, their spatial configuration can be arbitrary. Preferably, a configuration will be chosen that minimizes occlusion situations, ie situations in which obstacles are interposed between the microphone and the spatial region in which the sound source is to be located.
[0043] The actual system also needs to include a microphone signal conditioning loop to ensure signal amplification, filtering, sampling and A / D conversion. These loops have been omitted for simplicity and readability of the drawing. In this case it will therefore be considered that the microphones M1-M4 provide the signal in digital fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com