


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Visual navigation system of orchard robot
A visual navigation and robot technology, applied in navigation computing tools, road network navigators, control/regulation systems, etc., can solve the problems of high cost of electromagnetic navigation, easy to be affected by external factors, lack of reliability, etc., to improve reliability Performance and practicability, guarantee safety and reliability, and solve the effect of high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
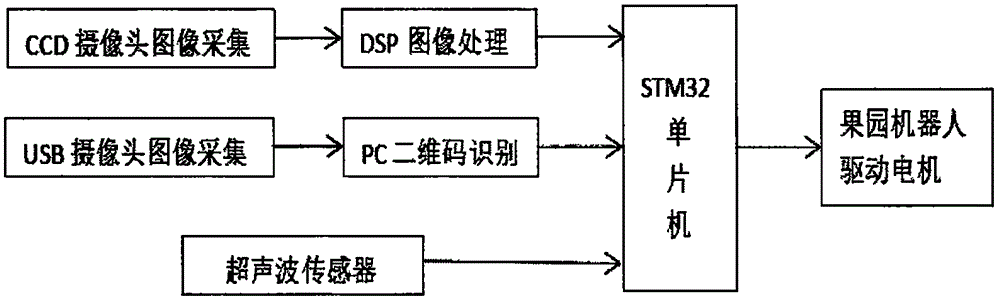
[0017] The CCD camera is installed at the center of the front end of the orchard robot and tilts downward at a certain angle. It is responsible for collecting image information related to the orchard path, and after real-time processing by the digital image processor DSP, the navigation baseline information is extracted, combined with the calibration parameters of the camera. , and finally determine the navigation parameters of the orchard robot in the actual environment, that is, the heading angle θ, and transmit θ to the single-chip control module. The USB camera is installed on the side of the orchard robot, opposite to the artificially arranged two-dimensional code signboard, responsible for collecting image information related to the two-dimensional code, and the PC recognizes and processes the image information of the two-dimensional code to obtain the relevant "straight line" ", "Turn left at the head of the field", "turn right at the head of the field", and finally pass...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com