Minimally-invasive surgery assistant robot
A minimally invasive surgery and robot technology, applied in the field of medical robots, to achieve the effects of good synchronization performance, compact structure, and high transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
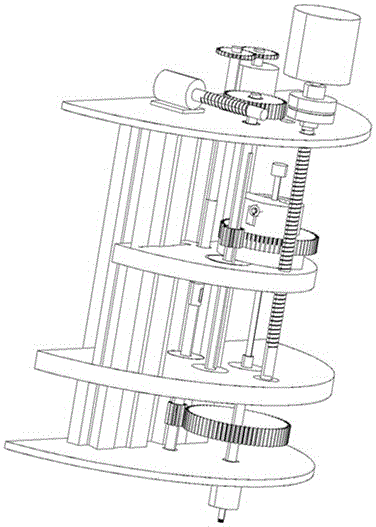
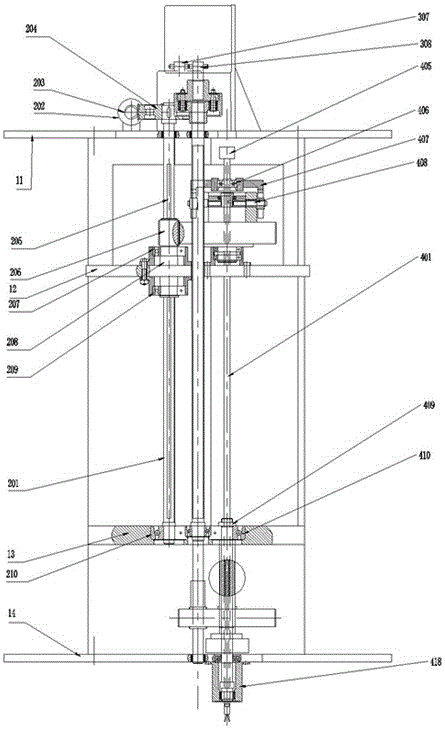
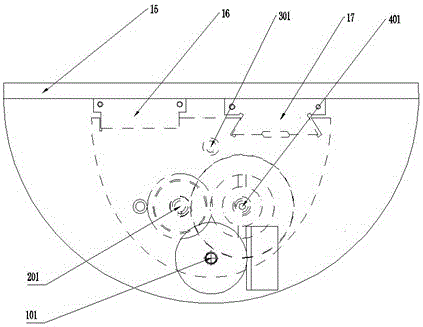
[0037] combine Figure 1 to Figure 7 Describe this embodiment, the robot of this embodiment includes a main shaft, a main shaft lifting mechanism, a main shaft rotation mechanism, a main shaft end opening and closing mechanism, and a main shaft lifting mechanism: the first motor 102 drives the lead screw 101 to rotate through the elastic pin coupling 103 , the lead screw 101 drives the nut 105 to screw together, so that the moving plate 12 realizes the lifting function on the dovetail guide rail 17 and the rectangular guide rail 16 . The moving plate 12 drives the umbrella-shaped housing 407 to move up and down, and the umbrella-shaped housing 407 drives the main shaft 401 to realize the lifting function;
[0038] Spindle rotation mechanism: the second motor 302 drives the first gear 307 to rotate, the first gear 307 meshes with the second gear 308, the second gear 308 drives the rotation shaft 301 to rotate, the third gear 305 on the rotation shaft 301 and the long sleeve 403...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com