Differential geometry nonlinear control method of spatial mechanical arm anti-interference attitude stabilization
A space manipulator and nonlinear control technology, applied in attitude control, motor vehicles, space navigation equipment, etc., can solve problems such as large amount of calculation, complex structure, and difficult engineering implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0109] The present invention will be described in further detail below in conjunction with the accompanying drawings:
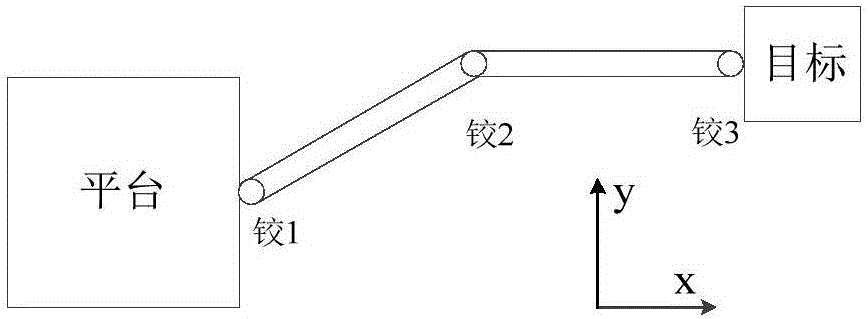
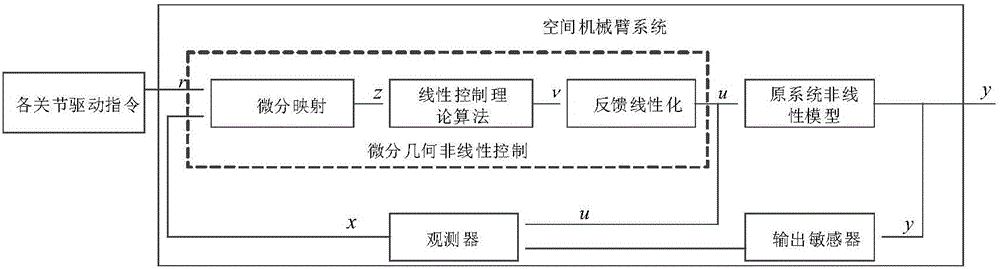
[0110] See figure 1 -Figure 9, the non-linear control method for anti-interference attitude stability of the space manipulator of the present invention, the specific steps include:
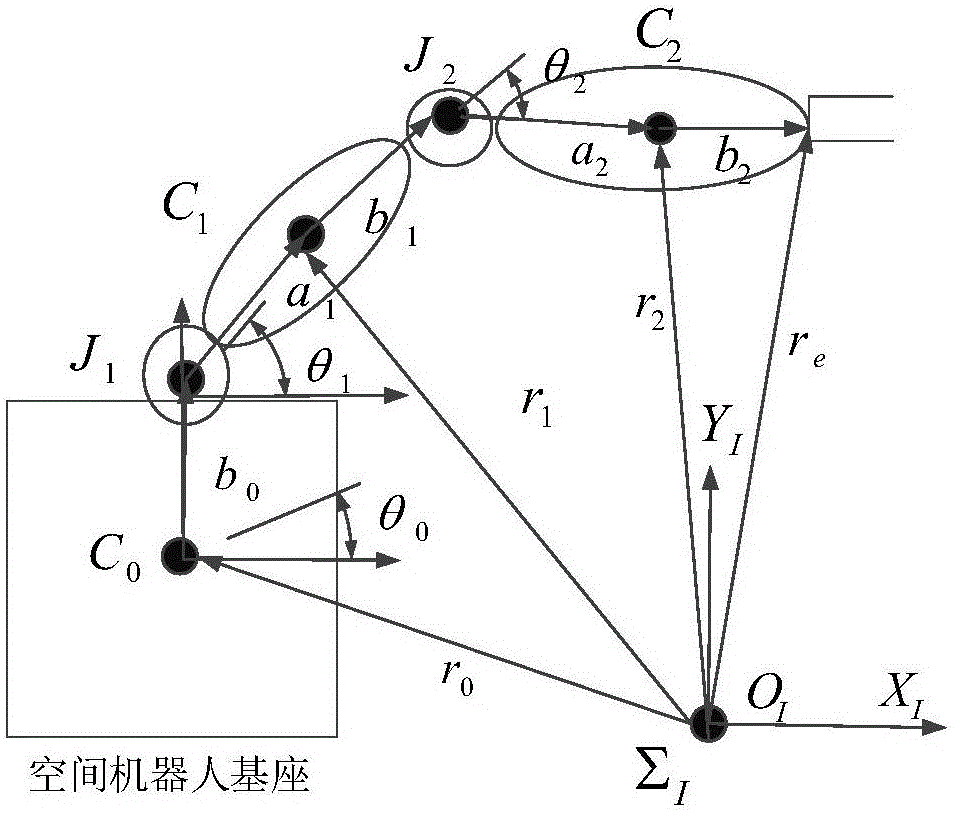
[0111] Step 1: Establish an affine nonlinear state space model of the free-flying space manipulator
[0112] Free flight refers to a mode of operation in which while controlling the motion of the space manipulator, only the attitude of the base is controlled, and the position of the base with less influence is not controlled. In order to maintain normal communication and the solar panel orientation to the sun without consuming too much fuel, the system must be operated in free flight mode. Due to the weightlessness of space equipment under normal control, the robotic arm system operating in space can be equivalent to planar mechanical motion, so when designing the controller, refer to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com