An Optimal Pathfinding Method Based on Region Boundary for Visual Logic Programming
A pathfinding and boundary technology, applied in data processing applications, special data processing applications, instruments, etc., can solve problems such as the inability to ensure the concentration of connecting lines, the inability to meet the visual effect, and the reduction of search efficiency, to achieve control path complexity, improve Wayfinding flexibility, reduced search range effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings of the description.
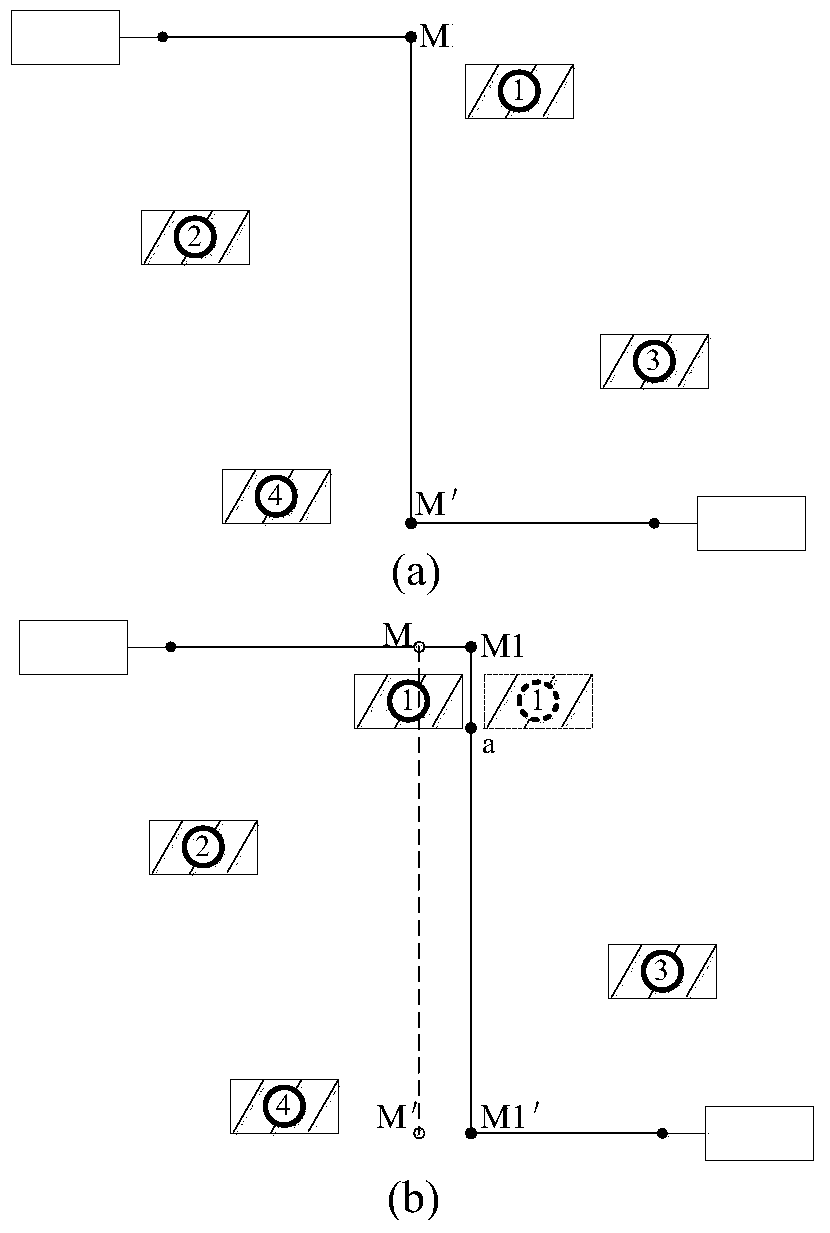
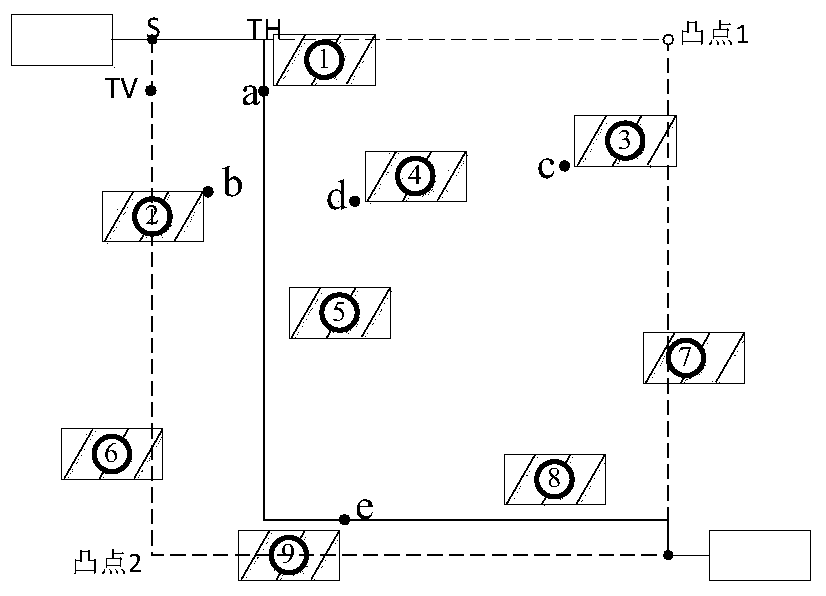
[0040] The platform that provides continuous function diagram configuration in the PLC language is a two-dimensional scene, the starting point is the pin point of the graphic entity where the input variable is located, the end point is the pin point of the graphic entity where the output variable is located, and the obstacles are other objects in the scene. Configuration primitives. The present invention calculates the wayfinding point through the area boundary, and the path line must be a horizontal or vertical line, and cannot be an oblique line.
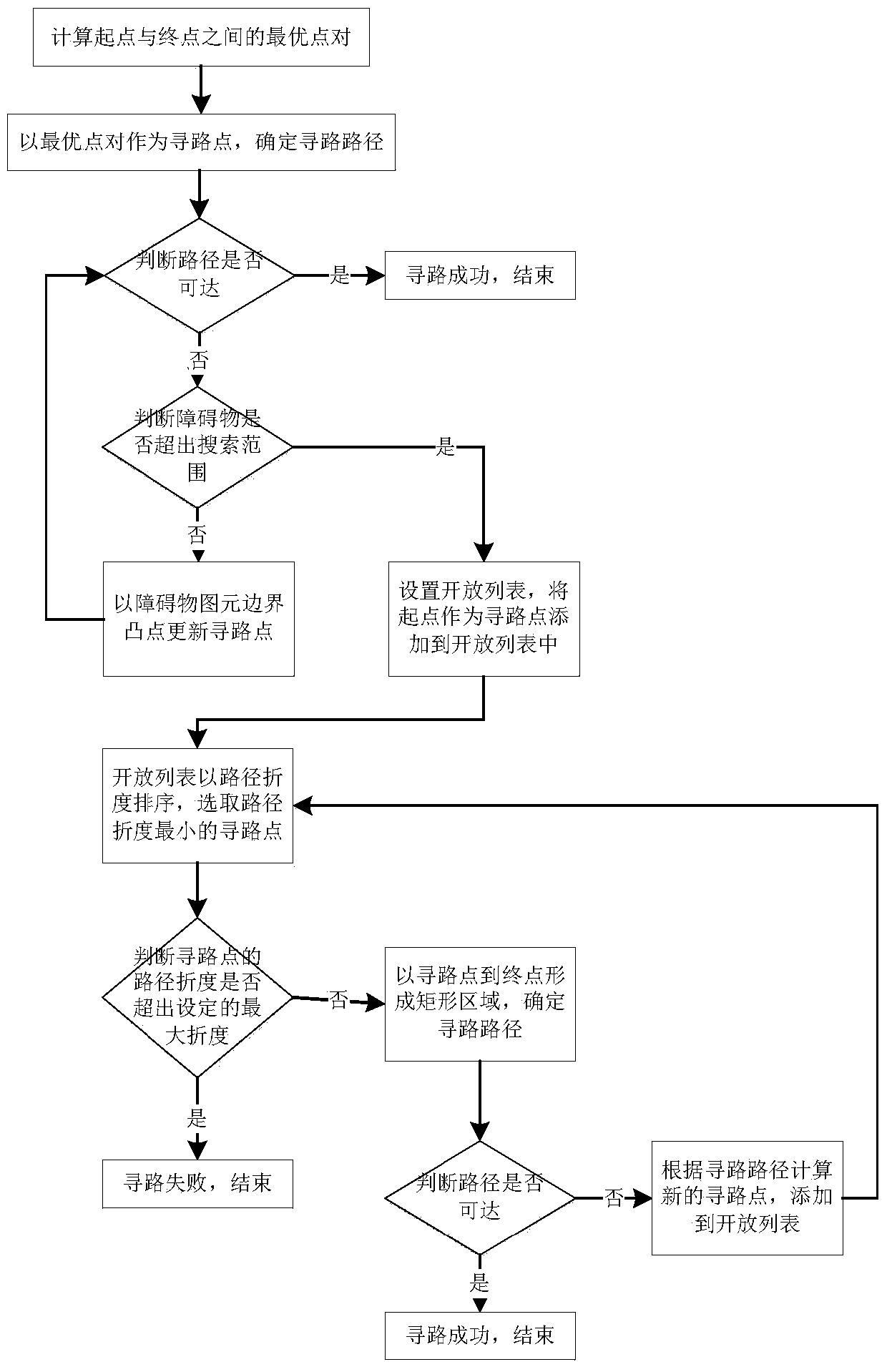
[0041] Such as figure 1 As shown, the pathfinding method based on the region boundary applied to logical visual programming disclosed by the present invention includes the following steps:
[0042] Step 1: Take the pin point of the primitive where the input variable ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com