Invasive four-legged wheel type robot
A robot and wheeled technology, which is applied in the field of attacking four-legged wheeled robots, can solve the problems of lack of remote control ability, target launch ability, single travel mode of four-legged robots, etc., and achieve the effect of attack
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
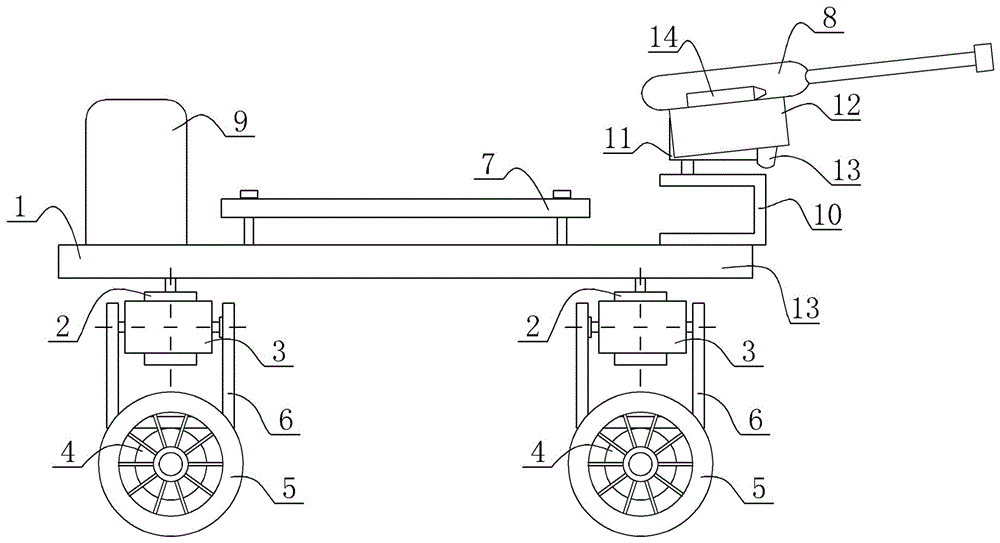
[0017] Such as figure 1 , figure 2 and image 3 As shown, the front view, rear view and left view of the attacking quadruped wheeled robot of the present invention are provided, which consists of a support plate 1, four legs, a circuit board 7, an electromagnetic gun 8, a power supply capacitor 9, an upper The bracket 10, the horizontal steering gear 11, the pitch steering gear 12, the camera 13 and the cross laser 14 are composed of the support plate 1 shown as a fixation and support function, and four legs are arranged on the four corners below the support plate 1. The structures of the legs are all connected, and each leg is composed of a rotating steering gear 2, a swing steering gear 3, a DC motor 4, a wheel 5 and a U-shaped bracket 6.
[0018] The output shaft of the rotary steering gear 2 is along the vertical direction, and is fixed on the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com