


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Scanning range finder
A technology of optical distance measuring instrument and distance measuring circuit, which is applied in the direction of instruments, measuring devices, radio wave measuring systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
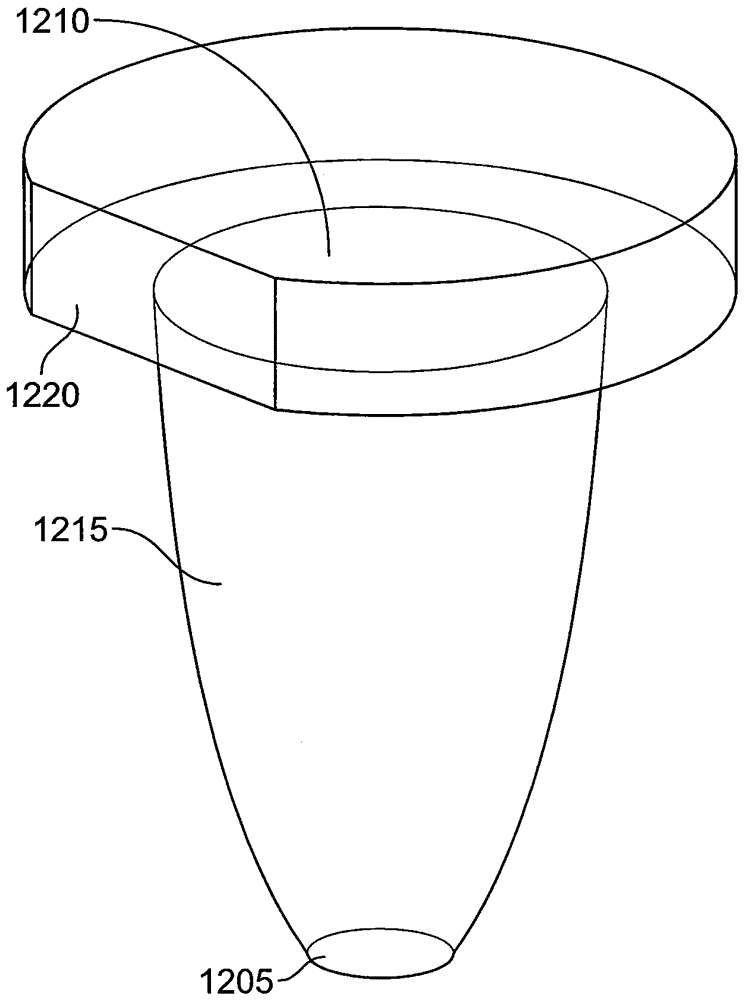
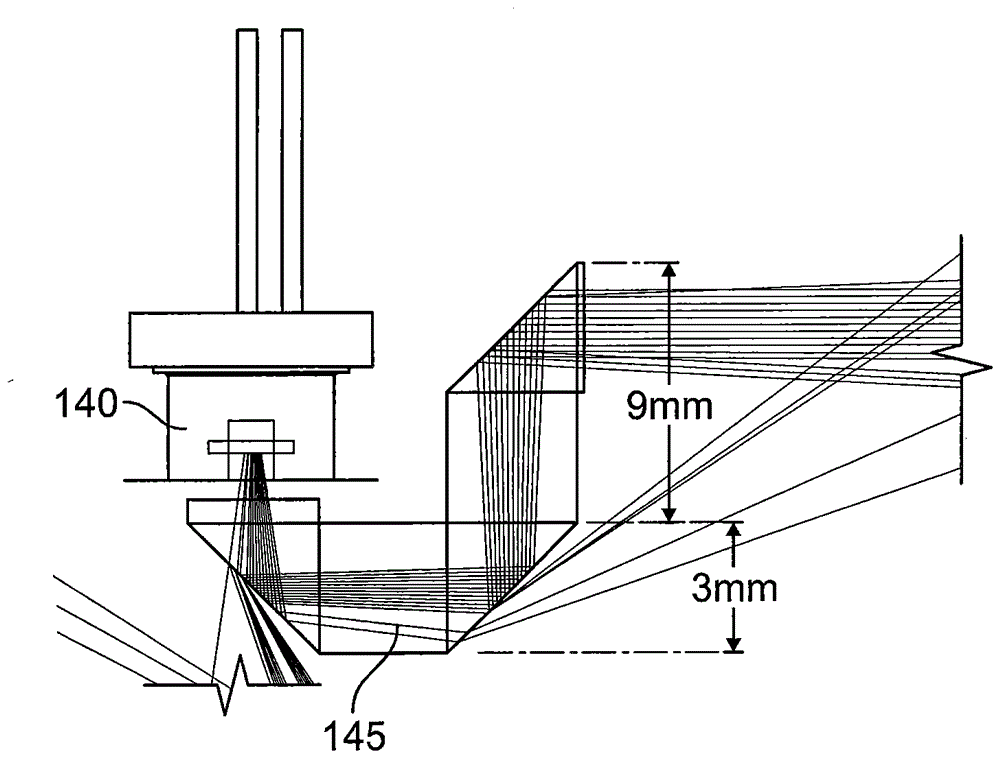
[0052] Autonomous robots that perform functions such as floor cleaning and lawn mowing rely on identifying obstacles, typically user-defined or invisible, to limit their movement. Such a robot can use a triangulation-based localization system to determine the robot's position within the perimeter. In the lawnmower example, signals sent between the lawnmower located in the garden property and beacons or environmental features around the lawn allow the lawnmower to calculate the robot's current position to estimate angles and distances. Systems and methods related to scanning rangefinders for use with robotic lawn mowers and other robotic devices are described herein. In some examples described herein, the scanning rangefinder includes non-imaging optics. In some additional embodiments, the systems and methods described herein recognize and account for wrap-back, which enables distances beyond wrap-back to appear as closer distances. Identifying and accounting for rollback ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com