Ship mooring assisting method and ship mooring assisting system
一种船舶、泊岸的技术,应用在准确监控船舶与岸线距离以及船舶姿态领域,能够解决无法安全地保证船舶雾天精确定位靠泊引航、难得到船体、数据误差等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
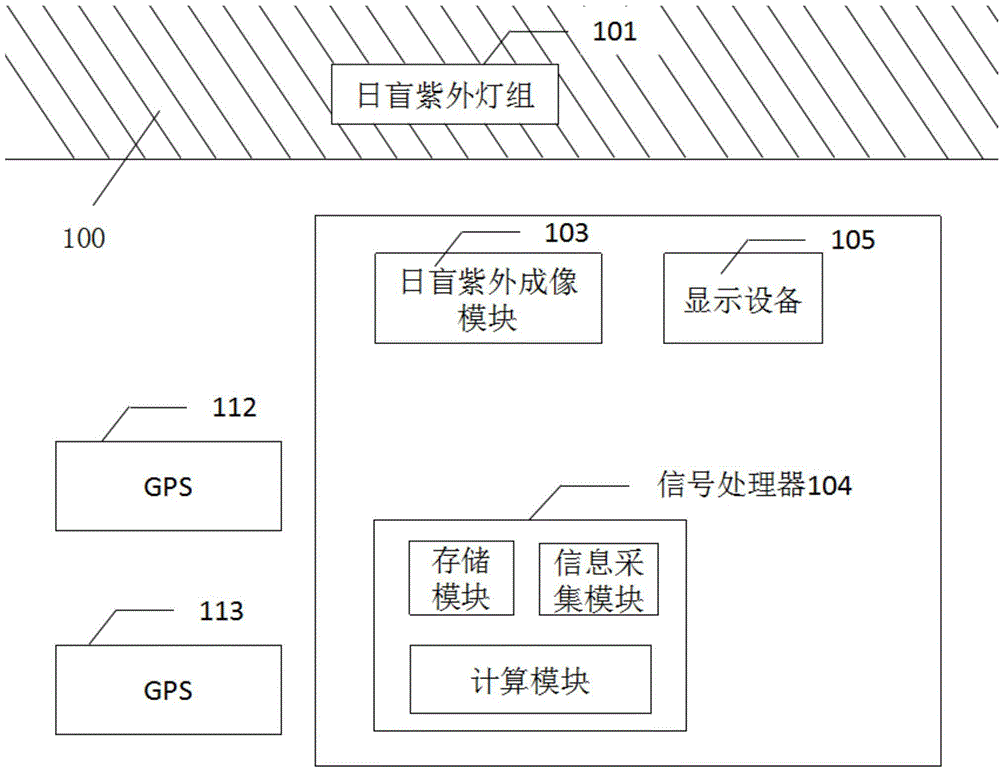
[0094] For the system block diagram of ship berthing navigation see figure 1 As shown, the present invention mainly solves the problem when ships berth in foggy weather at close range. The ship navigation system described in this embodiment includes a sun-blind ultraviolet lamp group 101, two GPS modules 112 and 113, a sun-blind ultraviolet imaging module 103, data A processing module 104 and a display device 105 .
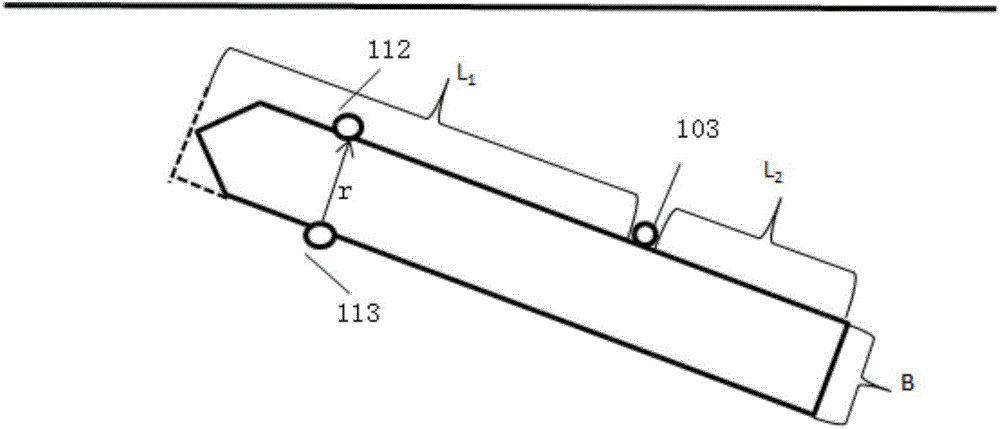
[0095] The GPS modules 112, 113 and the sun-blind ultraviolet imaging module 103 are respectively installed on the ship. The installation positions of the differential GPS 112 and 113 are the most convenient for determining the heading. In this embodiment, two differential GPSs are respectively installed on the decks on both sides of the cab, and the connection between the two can be roughly perpendicular to the connection between the bow and tail of the ship. Two differential GPS modules, a master GPS module (also called a master station) 112 are installed near...
Embodiment 2
[0134] This embodiment is about how to obtain optimal position information in multiple sets of data, and its algorithm is as follows:
[0135] use the vector p i (x i ,y i ,z i ) represents N sets of angle and space transformed positioning data returned by N systems, where i=1, 2, 3...N. The positioning data after the angle and space transformation are obtained by using the spatial position relationship and spatial geometric transformation when the relative positions and ship attitude angles of all solar-blind ultraviolet receiving modules and GPS signal receiving modules are known. , converting the position measurement data of different measurement modules into the position measurement data of the same measurement module. The specific transformation method is:
[0136] (1) determine a reference point, the reference point can be the location of any measurement module in the sun-blind ultraviolet receiving module and the GPS signal receiving module, and can also be other c...
Embodiment 3
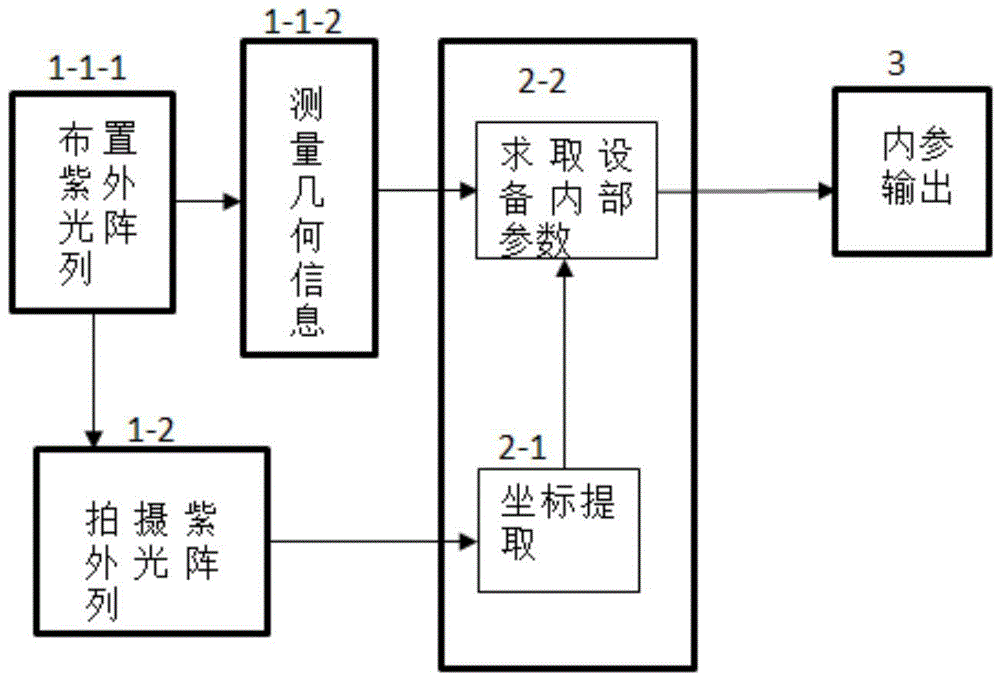
[0153] In the following example, the specific steps for calibrating the ultraviolet camera and solving the internal parameters in a system for enhancing the short-distance navigation capability of the ship according to the present invention are given:
[0154] There are many methods for camera calibration and algorithms for solving internal parameters. Here, traditional calibration techniques and Zhang Zhengyou calibration algorithms are preferred. Zhang Zhengyou’s calibration method uses a checkerboard-shaped calibration template, and the connection points of each black and white square on the calibration template are used as the feature points of the calibration board. The calibration board is placed in different positions, and the internal and external parameters of the camera are obtained after synchronous acquisition by the camera. This method has good robustness, does not need expensive instruments and equipment, and is easy to operate. Compared with the self-calibration...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com