Indoor moving target positioning method based on trajectory smoothing
A technology of moving targets and positioning methods, applied in positioning, measuring devices, instruments, etc., can solve the problems of distance measurement result deviation, electromagnetic wave transmission difference, measurement noise disobedience, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
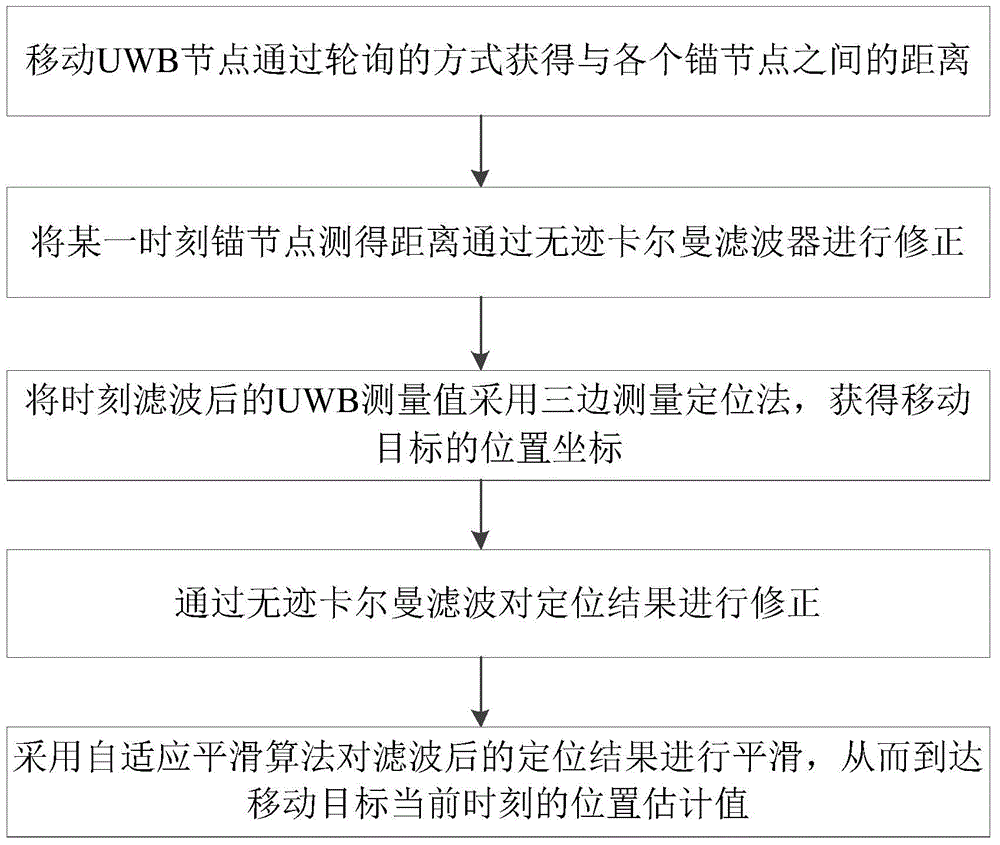
[0046] Such as figure 1 As shown, it is a trajectory smoothing-based indoor moving target positioning method proposed by the present invention, which uses a multi-stage unscented Kalman filter and an adaptive smoothing algorithm, including the following steps:
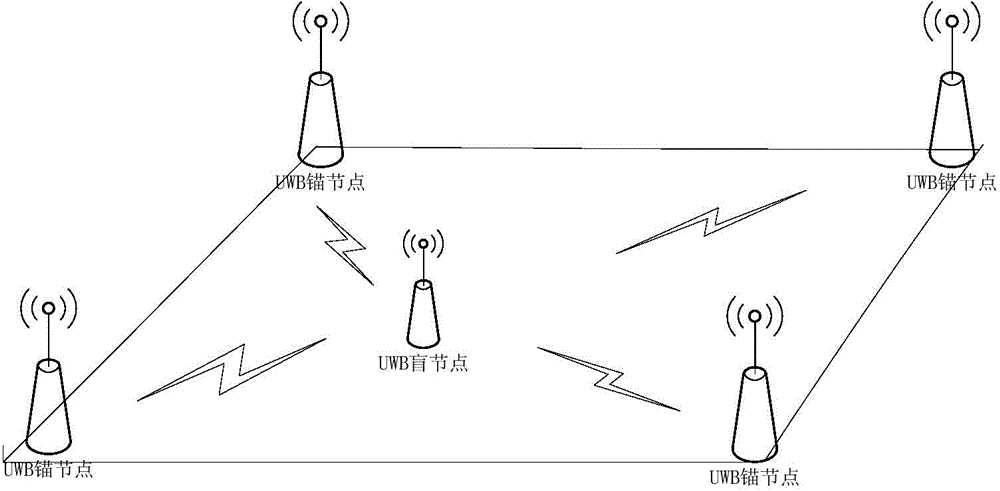
[0047] (1) The mobile UWB node obtains the distance from each anchor node by polling;
[0048] The polling interval can be adjusted adaptively. When the moving target moves quickly, use a smaller polling interval; and when the moving target moves slowly or is still, set a larger polling interval to reduce power consumption;
[0049] (2) Correct the distances measured by all anchor nodes at a certain moment through the unscented Kalman filter;
[0050] Among them, performing unscented Kalman filtering on the UWB measurement value is specifically:
[0051]Assum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com