Industrial robot absolute accuracy calibrating method based on IEKF
An industrial robot, absolute precision technology, applied in the field of robot calibration, can solve the problems of poor precision, time-consuming, truncation error and other problems of robot identification, achieve high precision, improve identification accuracy, and reduce linearization error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments and with reference to the accompanying drawings.
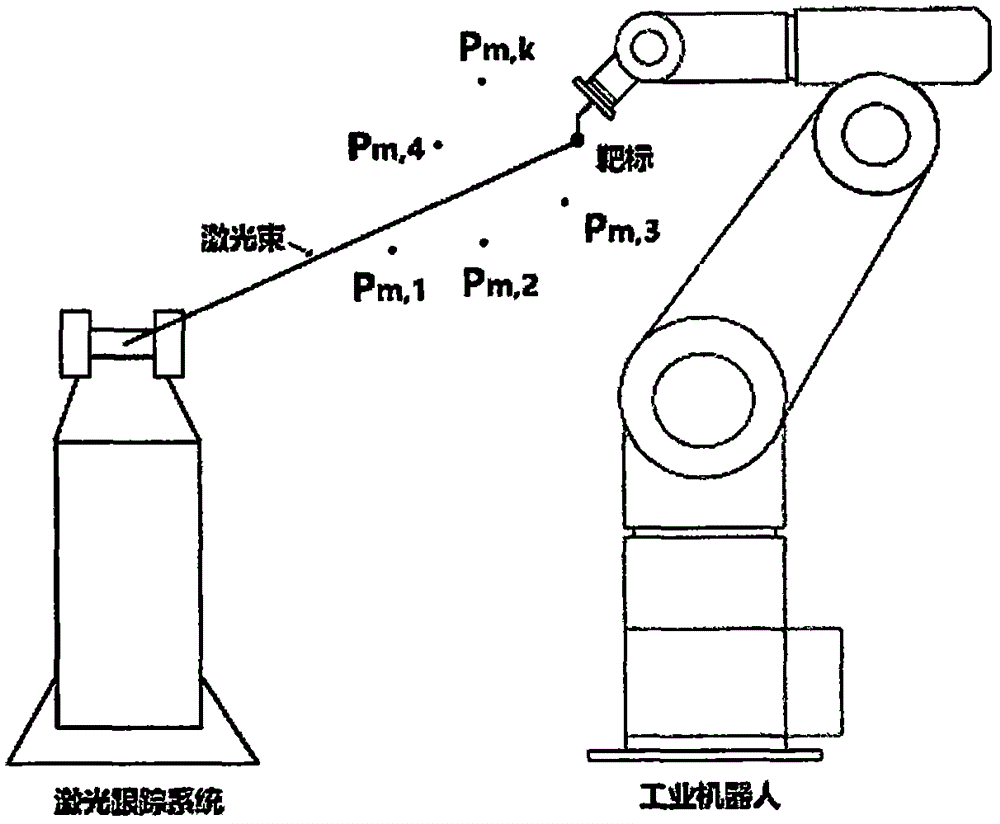
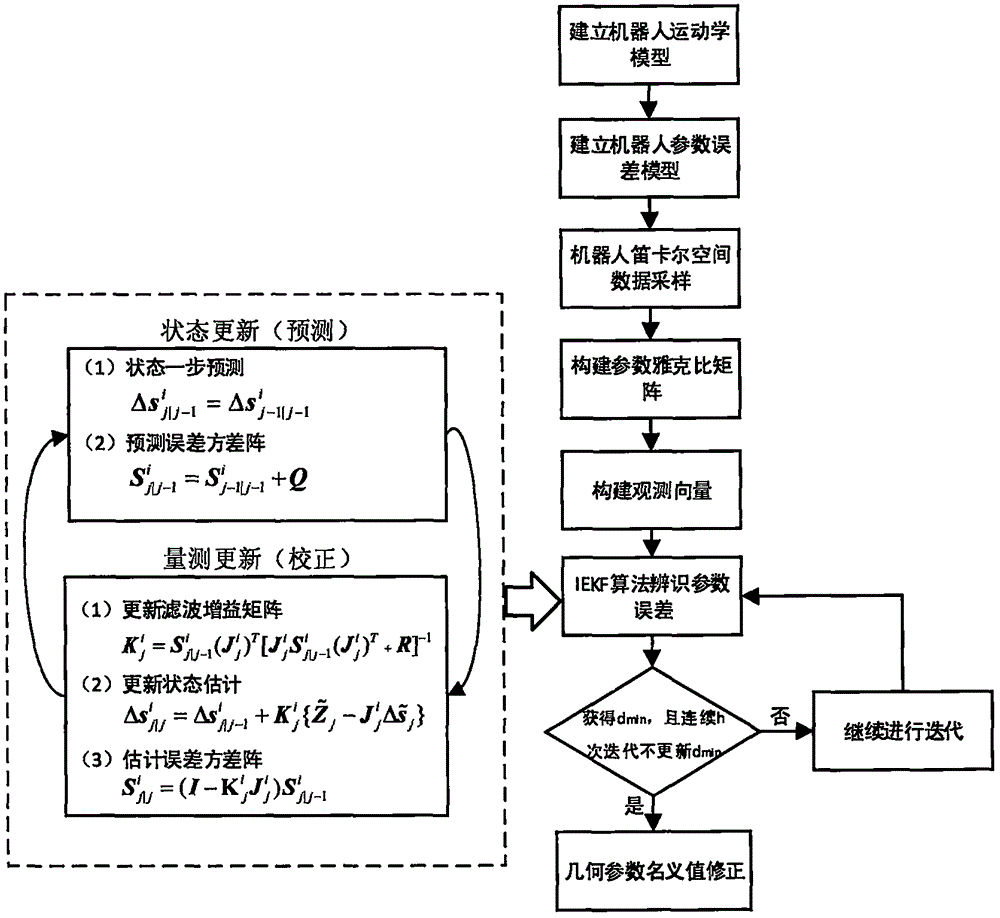
[0022] An IEKF-based absolute precision calibration method for industrial robots, the operation flow chart is as follows figure 2 As shown, the method includes the following steps:
[0023] The first step: establish a robot kinematics model, including the following steps:
[0024] Step (1), using the D-H rule to build a robot kinematics model.
[0025] In the D-H rule, the kinematic relationship between two adjacent bars is:
[0026] T i - 1 i = cosθ i - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com