Realization method for running of hexapod robot
A technology of a hexapod robot and a realization method, which is applied in the realization field of hexapod robot walking, can solve the problems of monotonous and blunt movements, strong sense of rhythm, and inability to keep the front direction of the robot body stable and consistent, so as to achieve smooth and stable gait, avoid The effect of stuttering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
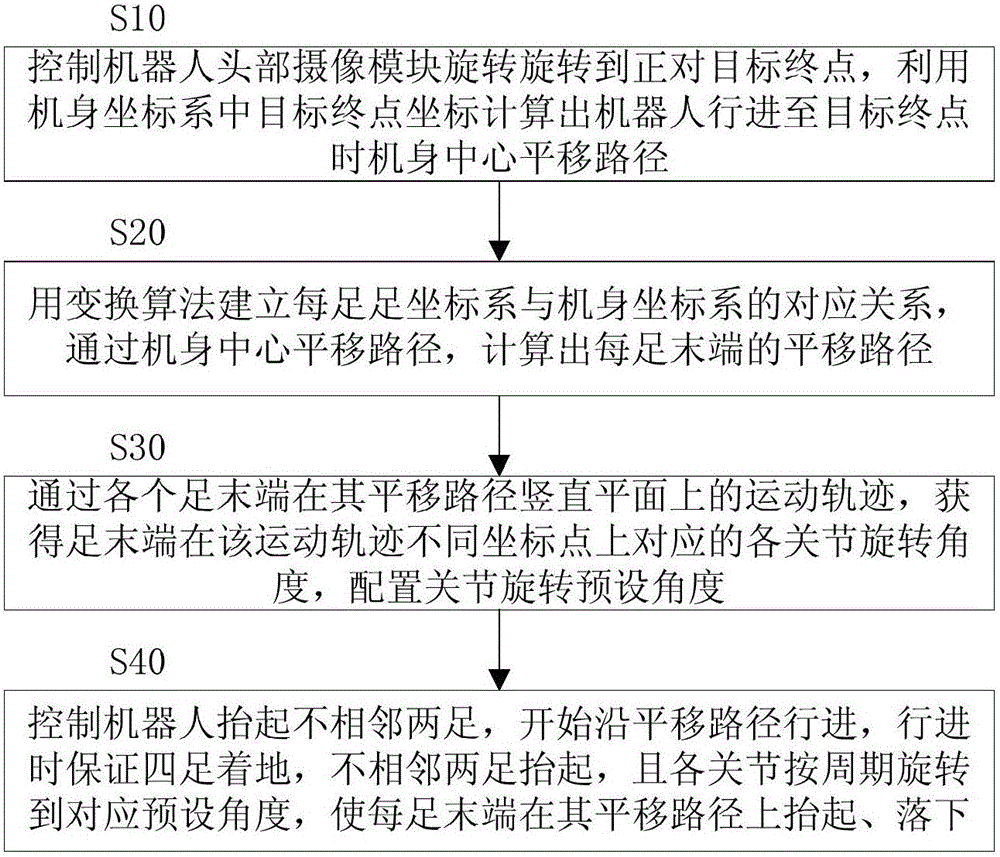
[0039] The present invention is based on a hexapod robot whose fuselage is a circumferentially symmetrical structure and whose hexapods are evenly distributed on the circumference of the fuselage. The head of the robot on the fuselage can rotate 360 degrees and has a camera module on the front face of the head. . For convenience of description, the present invention defines three coordinate systems, specifically as follows:
[0040] The fuselage coordinate system, with the center of the robot fuselage as the origin, the line passing through the origin, parallel to the plane of the fuselage, and perpendicular to the center line of the front face of the head is the Y axis, and the line parallel to the plane of the fuselage and perpendicular to the Y axis is X Axis, the straight line perpendicular to the plane of the fuselage is the Z axis;
[0041] In the foot coordinate system, the connection between the heel of each foot and the fuselage is the origin of the coordinates, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com