Interaction control method and device of intelligent sweeping robot
A sweeping robot, interactive control technology, applied in two-dimensional position/channel control, control/adjustment system, non-electric variable control and other directions, can solve the problem of not building a global map, getting lost, reducing cleaning efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0085] In the first embodiment of the present invention, an interactive control method of an intelligent sweeping robot, the process executed on the side of the intelligent sweeping robot includes the following specific steps:
[0086] During the movement of the intelligent sweeping robot, when an abnormal movement occurs, report the abnormal movement event of the intelligent sweeping robot to the user terminal, and determine whether a movement instruction from the user terminal has been received, and if so, move according to the movement instruction.
[0087] Specifically, the event type of the motion abnormality includes at least one of the following: area dead angle, operation endless loop, area repetition, and movement abnormality caused by failure of the intelligent sweeping robot;
[0088] The movement direction or destination is indicated in the movement instruction.
no. 2 example
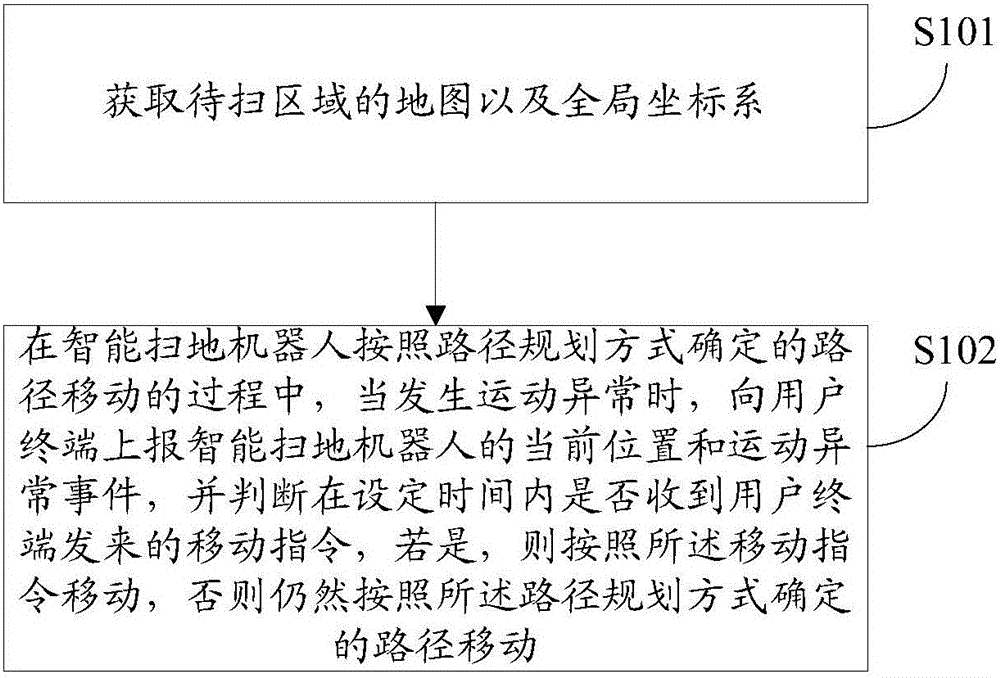
[0089] In the second embodiment of the present invention, an interactive control method of an intelligent sweeping robot, such as figure 1 As shown, the process performed by the method on the side of the intelligent sweeping robot includes the following specific steps:
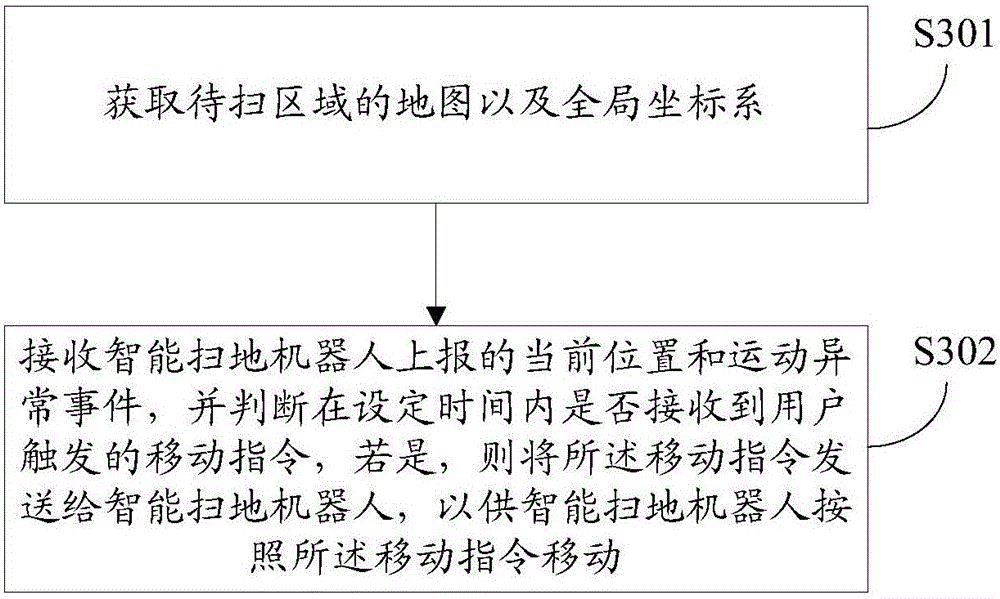
[0090] Step S101, obtaining the map of the area to be scanned and the global coordinate system;
[0091] Specifically, the map records the area blocks divided into the area to be scanned and the exits of each area block.
[0092] Step S102, during the movement of the intelligent sweeping robot in the area to be cleaned according to the path determined by the path planning method, when an abnormal movement occurs, report the current position and abnormal movement event of the intelligent sweeping robot to the user terminal, and judge the Whether a moving instruction from the user terminal is received within the set time, if yes, move according to the moving instruction, otherwise move according to the path det...
no. 3 example
[0100] The third embodiment of the present invention is an interactive control method for an intelligent sweeping robot. The method described in this embodiment is roughly the same as that in the second embodiment. The difference is that the method described in this embodiment is a process executed on the side of an intelligent sweeping robot. Also includes the following specific steps:
[0101] During the movement of the intelligent sweeping robot according to the path determined by the path planning method, when the intelligent sweeping robot sweeps the floor in any area block in the map and detects an obstacle, draw the outline position of the obstacle on the and update the map in the user terminal.
[0102] Preferably, the process performed by the method on the side of the intelligent sweeping robot also includes:
[0103] After drawing the outline position of the obstacle in the map, judge whether a movement instruction from the user terminal is received within the set t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com