Four-degree-of-freedom humanoid parallel-connection vibration-reduction mechanical foot
A technology of degrees of freedom and mechanical feet, applied in the field of humanoid robots, can solve the problems of less freedom of movement, poor vibration isolation effect, and inability to simulate the movement of human feet, and achieve the effect of realizing movement posture simulation and simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
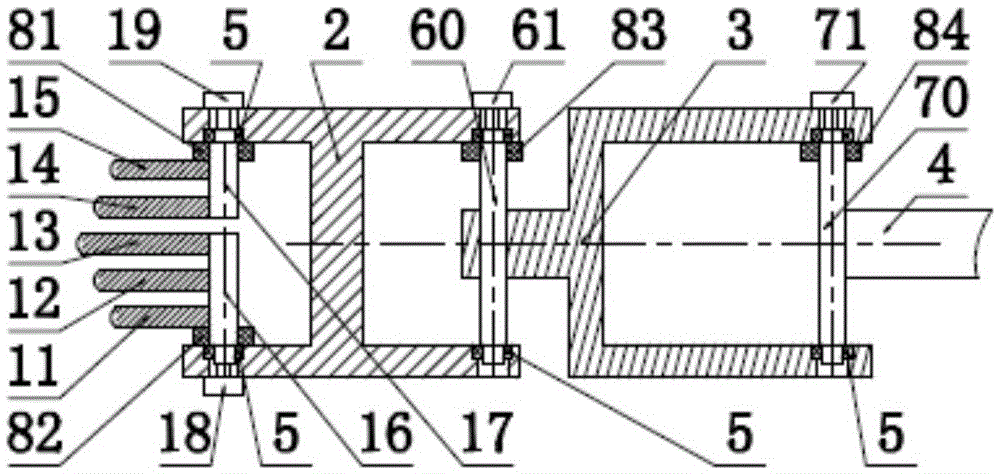
[0012] see figure 1 As shown, the four-degree-of-freedom humanoid parallel vibration-damping mechanical foot of the present invention includes an ankle joint shaft 70 equipped with a mechanical lower leg 4, a tarsus plate 3, and is installed on the tarsus plate 3 and connected to one end of the ankle joint shaft 70. Ankle motor 71, the tarsus shaft 60 that is equipped with tarsus plate 3, the I-shaped metatarsal plate 2, the tarsus motor 61 that is installed on the I-shaped metatarsal plate 2 and links to each other with tarsal shaft 60 one end, along the same line respectively The toe axis A16 and toe axis B17 installed on the front and rear sides of the I-shaped metatarsal plate 2, the parallel toe A installed on the toe axis A16, the parallel toe B installed on the toe axis B17, and the I-shaped metatarsal The toe motor A18 connec...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap