Positioning and navigation control method of indoor mobile robot based on UWB
A mobile robot and control method technology, applied in two-dimensional position/channel control, service based on position information, positioning and other directions, can solve the problems of large position accuracy error, insufficient flexibility of AGV car, rearranged image background, etc. Achieve high positioning accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Below in conjunction with specific embodiment, working principle of the present invention and concrete technical scheme are described in further detail:
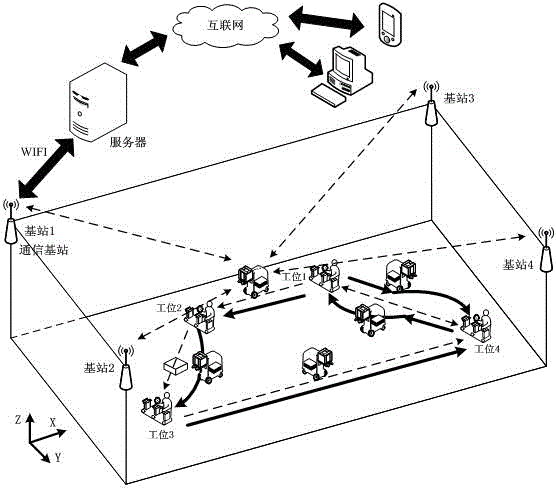
[0037] Indoor mobile robot applications can be summarized into two parts: localization and navigation. Positioning means that the mobile robot calculates its own plane position information S(x, y) in real time based on the ranging data of four base stations; Path information (the walking path of the robot set by the user), can automatically plan the path and control the mobile robot to move forward. At the same time, the mobile robot can automatically perform obstacle avoidance and anti-collision processing according to the current working environment
[0038] figure 1 It is a UWB-based indoor mobile robot positioning and navigation system control effect diagram, simulating a workshop with 4 production stations, and 5 mobile robots realize the automatic handling of raw materials between stations for processing.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com