Mobile robot obstacle avoidance path planning method
A mobile robot and path planning technology, applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve problems such as failure to reach the designated target point, intelligent robot falling into local minimum, and complex local environmental information, etc. The effect of adaptive and flexible planning of obstacle avoidance paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0042] A mobile robot obstacle avoidance path planning method, the specific steps are as follows:
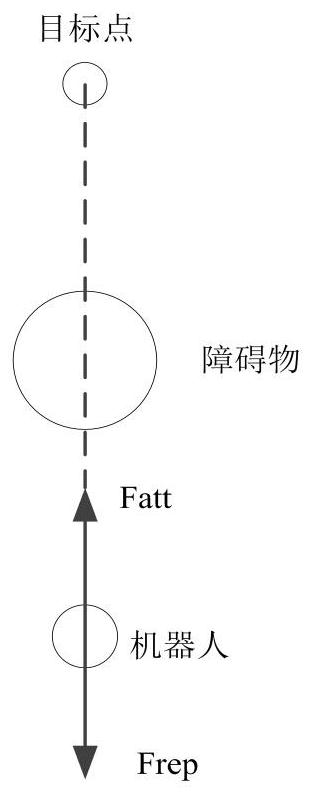
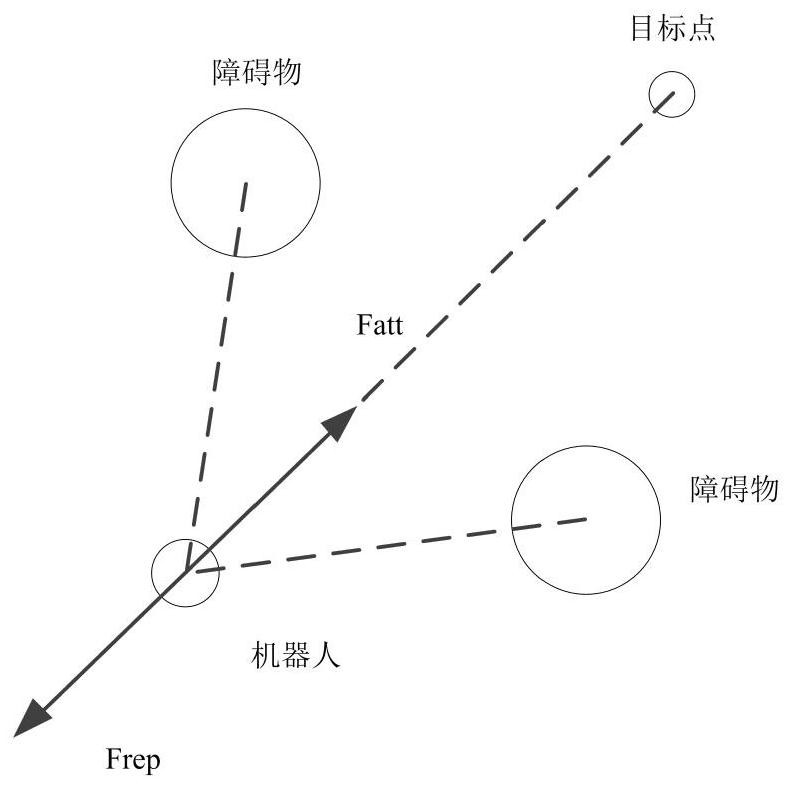
[0043]1. Construct a grid environment map based on the working environment information obtained by the external sensor lidar of the mobile robot. Each grid is marked as having obstacles and free space according to the environmental information, and the gravitational scale factor ε and repulsion scale are initialized. Factor η, obstacle influence distance ρ 0 , the step length l and the robot starting point and reaching the target point.
[0044] 2. Calculate the gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com