Gear type self-adaptive robot finger device with rope and springs assisting in grabbing
A robot finger, self-adaptive technology, applied in manipulators, chucks, manufacturing tools, etc., can solve problems such as instability, fingers quickly colliding with objects, squeezing objects, etc., to achieve low manufacturing and maintenance costs, fast and stable grasping process. , The effect of preventing rebound instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
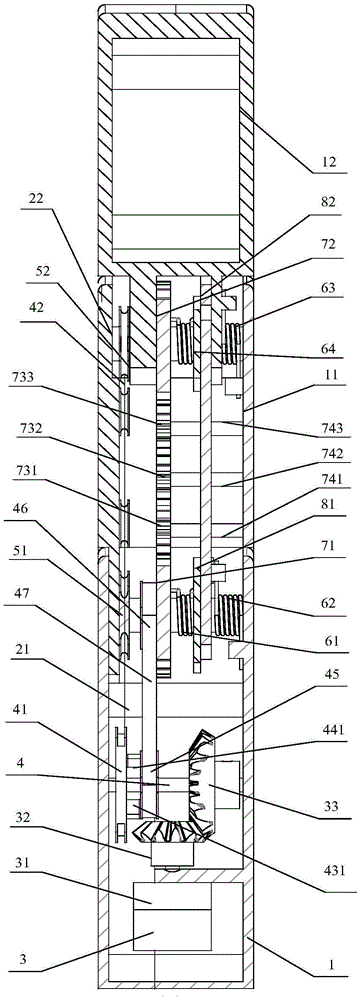
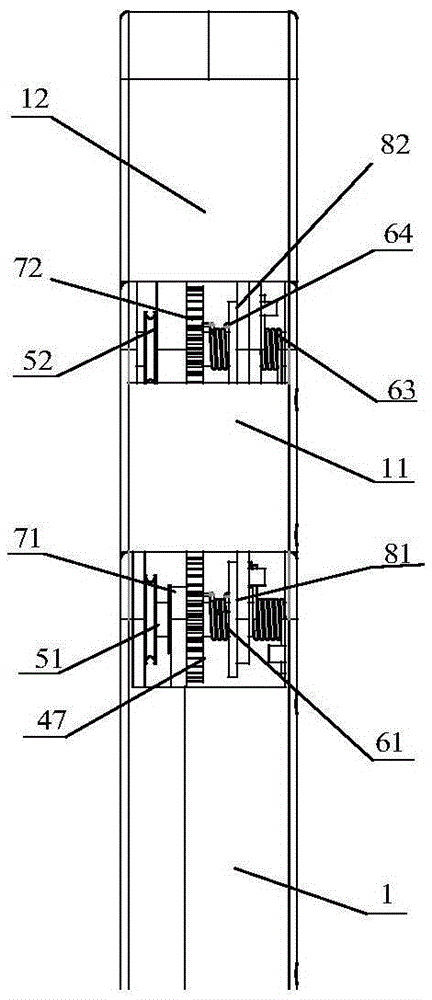
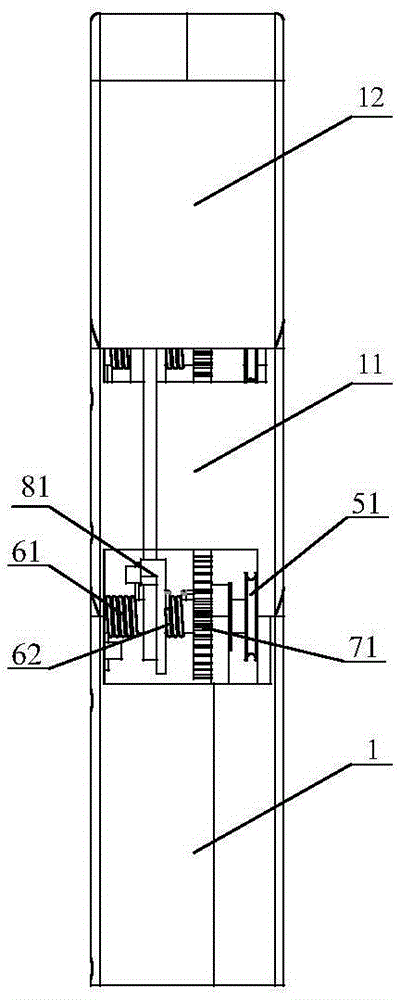
[0046] A kind of embodiment of the gear type collaborative grab rope spring self-adaptive robot finger device of the present invention design, as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 with Image 6 As shown, if the number N of intermediate gears is 3, the number of intermediate shafts is also 3. This embodiment includes a base 1, a first finger segment 11, a second finger segment 12, a first joint shaft 21, a second joint shaft 22, a motor 3, a first transmission mechanism, a transition shaft 4, a rope winding wheel 41, Tendon rope 422, the first pulley 51, the second pulley 52, the first spring 61 and the second spring 62; the motor 3 is fixedly installed on the base 1, the output shaft of the motor 3 and the first transmission mechanism The input end is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com