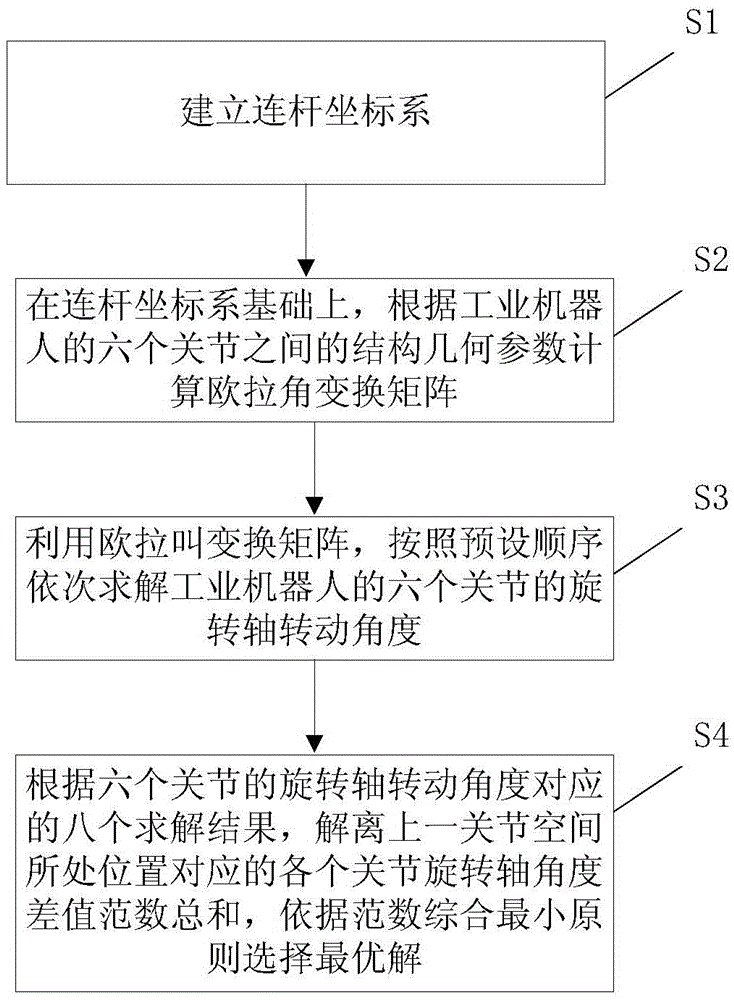
Inverse kinematics solving method for 6-DOF (degree of freedom) industrial robot
An industrial robot, inverse kinematics technology, applied in the field of inverse kinematics solution of industrial robots, can solve the problems of complex and difficult solution process, single modeling method, slow solution speed, etc., so that the coordinate system modeling method is simple and easy to understand , the effect of fast solution speed and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The embodiments of the present invention will be described in detail below. Examples of the embodiments are shown in the accompanying drawings, wherein the same or similar reference numerals indicate the same or similar elements or elements with the same or similar functions. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention, but should not be construed as limiting the present invention.
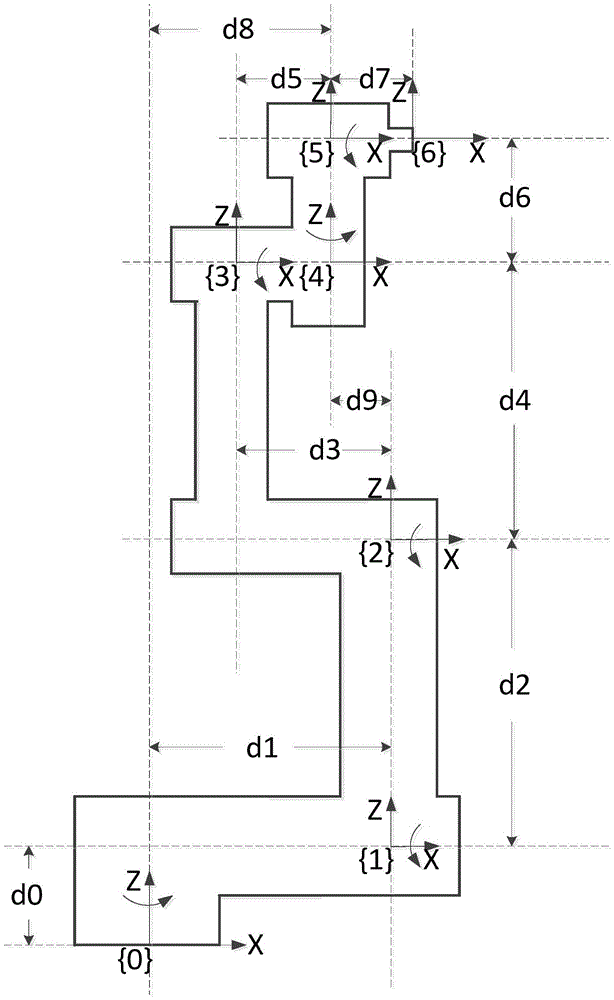
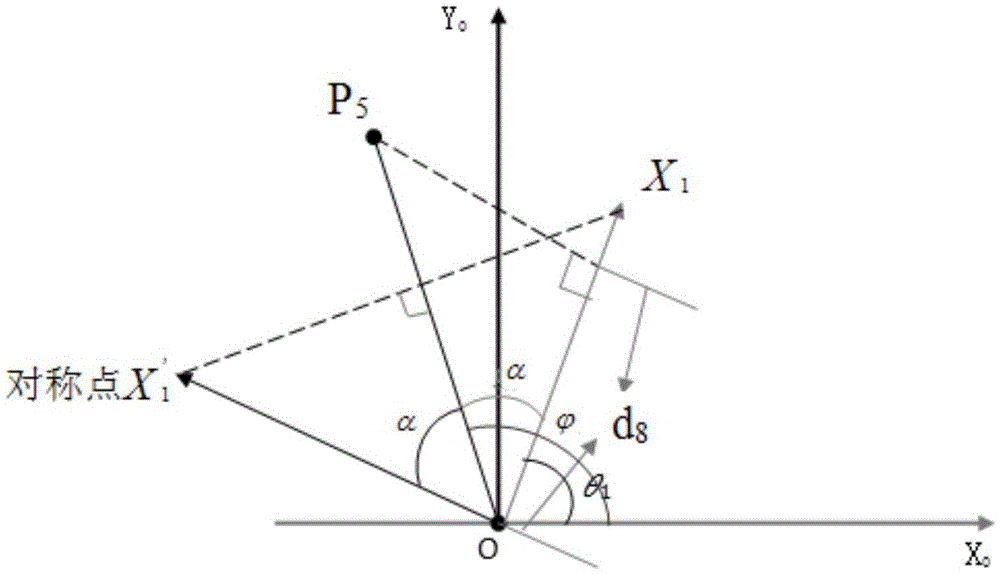
[0028] The present invention proposes an inverse kinematics solution method for industrial robots with six degrees of freedom, which uses geometric analysis method and Euler angle transformation method to solve the inverse kinematics solution of industrial robots with special configurations. The special configuration of this type of industrial robot is that the rotation axes of the coordinate system {3}, {4}, {5} do not intersect at the same point, and there is no singularity in the wrist of this ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com