Intelligent spherical robot with fault tolerance control and control method of robot
A spherical robot, fault-tolerant control technology, applied in two-dimensional position/channel control and other directions, can solve the problem that the overall spherical design does not have mechanical operation ability, affects the practical value and intelligence of spherical robots, and does not fully reflect the spherical advantages, etc. problem, to achieve the effect of convenient control, powerful function and flexible structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
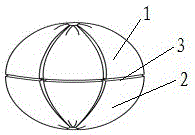
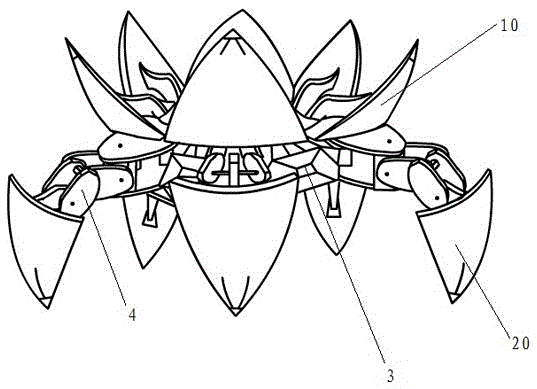
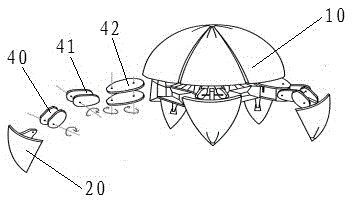
[0030] Such as Figure 1~4 As shown, a kind of intelligent spherical robot with fault-tolerant control comprises two upper hemispherical surfaces 1 and lower hemispherical surfaces 2 cooperating with each other, and the upper and lower hemispherical surfaces 1 and lower hemispherical surfaces 2 are surrounded into a sphere; the upper hemispherical surface 1 and the lower hemispherical surface 2 are evenly divided into six fan-shaped upper mechanical feet 10 and lower mechanical feet 20, and the six upper mechanical feet 10 and the six lower mechanical feet 20 correspond to each other; An annular support plate 3 between the surface 1 and the lower hemispherical surface 2, the upper end of the support plate 3 fixes six upper steering gears electrically connected to the upper mechanical foot 10 respectively at equal intervals along the peripheral ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com