A Vibration Active Control Method of Flexible Manipulator Using Piezoelectric Ceramic Chips under Soft Sensing
A flexible robotic arm, piezoelectric ceramic sheet technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve problems such as inherent modes affecting the dynamic characteristics of flexible arms, control overflows, and complex system structures. Achieve the effect of reducing vibration observation error, saving cost and simplifying system structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
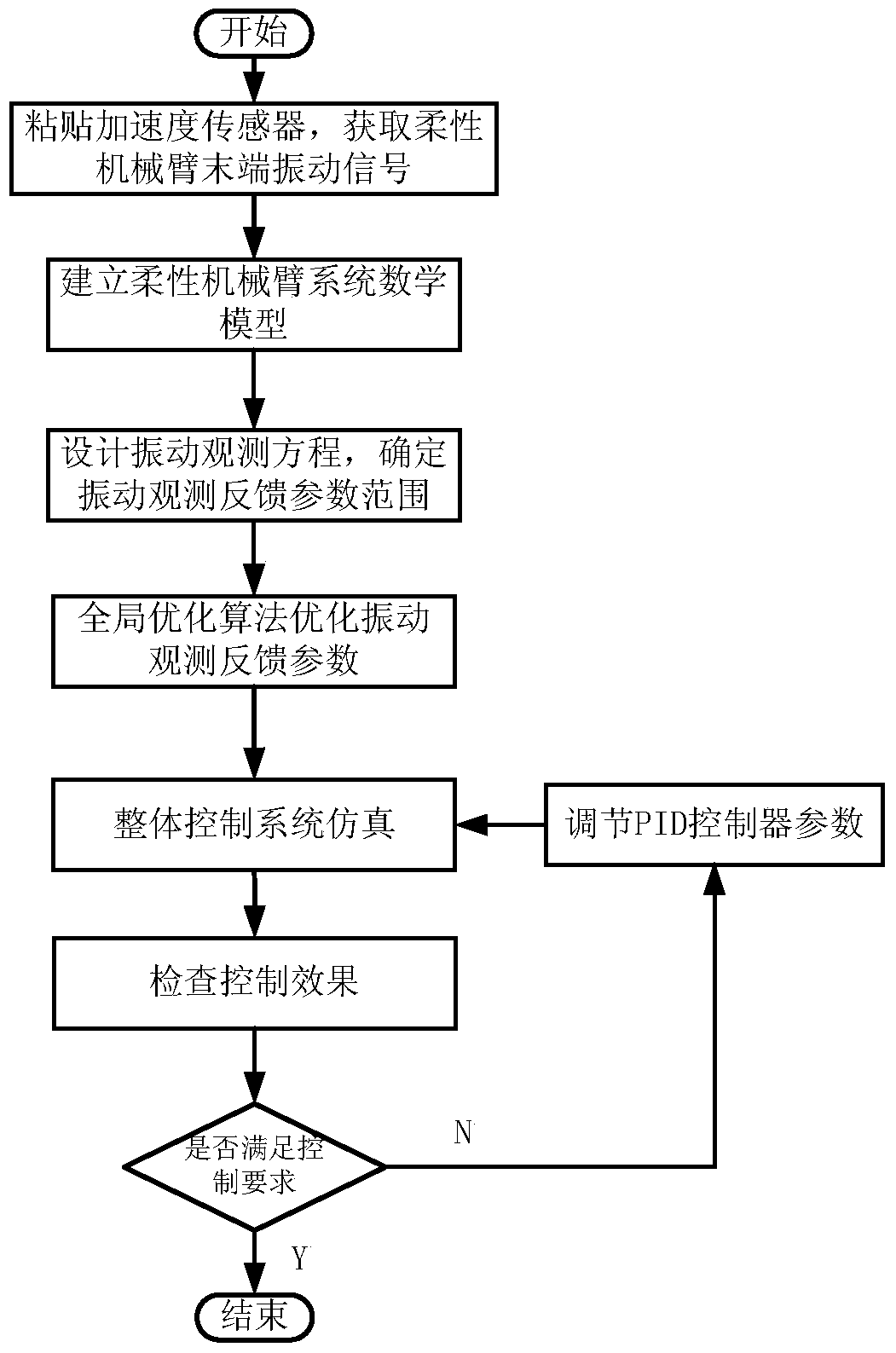
[0037] The present invention will be further described below in conjunction with accompanying drawing.
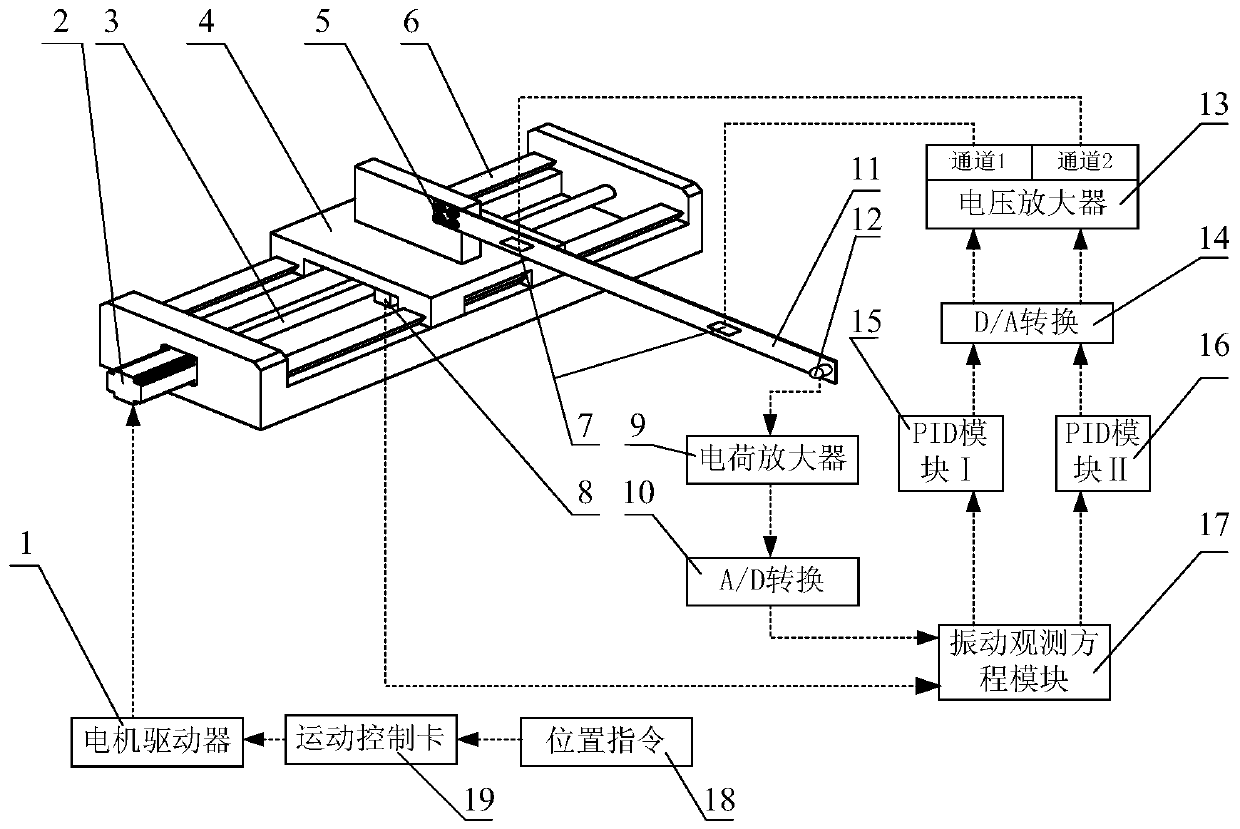
[0038] like figure 2 Shown is an active vibration control device for a flexible manipulator using piezoelectric ceramics under soft measurement, in which the stepping motor 2 drives the slider 4 to move on the guide rail 6 through the ball screw 3, and the bolt 5 controls the vibration of the flexible manipulator 11. One end is rigidly connected with slider 4;
[0039] The displacement of the slider 4 is measured by a grating ruler 8 , and the vibration at the end of the flexible mechanical arm 11 is measured by an acceleration sensor 12 . The acceleration sensor 12 output signal is input to the vibration observation equation module 17 through the charge amplifier 9 and the A / D conversion module 10;
[0040] The position instruction module 18 sets the expected position of the slider 4, and drives the stepper motor 2 to move the slider 4 to the designated position through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com