In-pipe walking robot
A walking robot and walking mechanism technology, applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve problems such as unfavorable robot maintenance operations, increase robot load, and affect robots, so as to facilitate pipeline construction operations and subsequent robot maintenance operations , The mechanical connection relationship is simple and the effect of ensuring synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
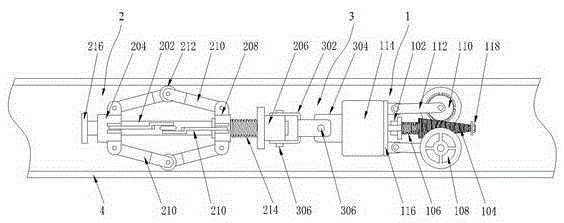
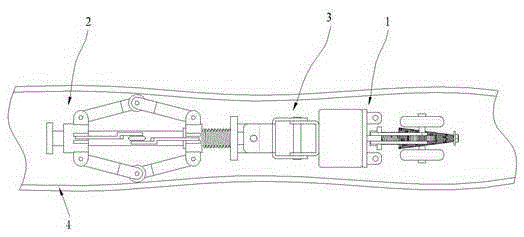
[0040] see Figure 1 to Figure 5 , the present invention provides a walking robot in a pipeline, including a walking mechanism 1, a connecting rod assembly 2, and a universal connection mechanism 3;
[0041] Described walking mechanism 1 comprises:
[0042] A transmission mechanism, which is provided with an output shaft, the output shaft is fixed with a shaft connector 102, and a coaxial and freely sliding worm 104 is nested on the shaft connector 102, the side of the worm 104 is an arc surface, and the shaft The end of the connector 102 away from the transmission mechanism is provided with an anti-slip component; and
[0043] A first pressure spring 106, nested on the output shaft, is located between the shaft connector 102 and the worm 104; and
[0044] Two traveling wheels 108, each traveling wheel 108 is connected with a worm wheel 110 which ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com