Wolfberry picking robot and control method thereof
A technology for picking robots and wolfberry, which is applied to picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of high manufacturing cost, poor versatility, and lack of versatility of robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described in detail below in conjunction with the accompanying drawings, which are explanations rather than limitations of the present invention.
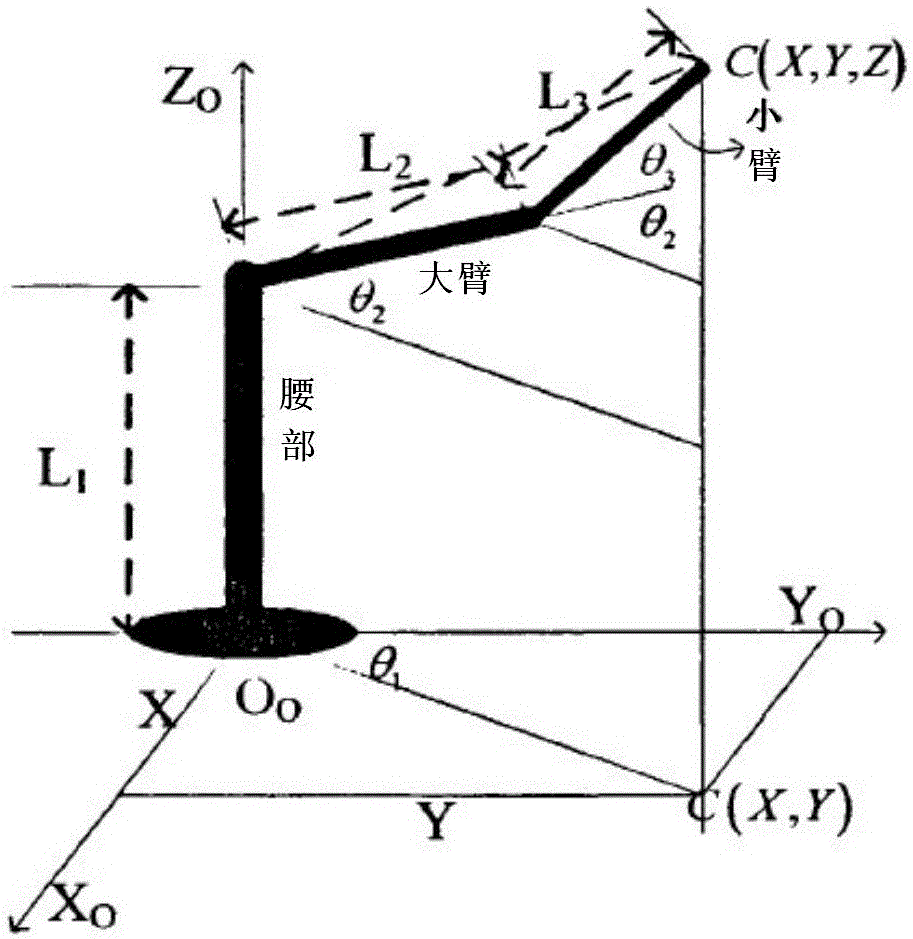
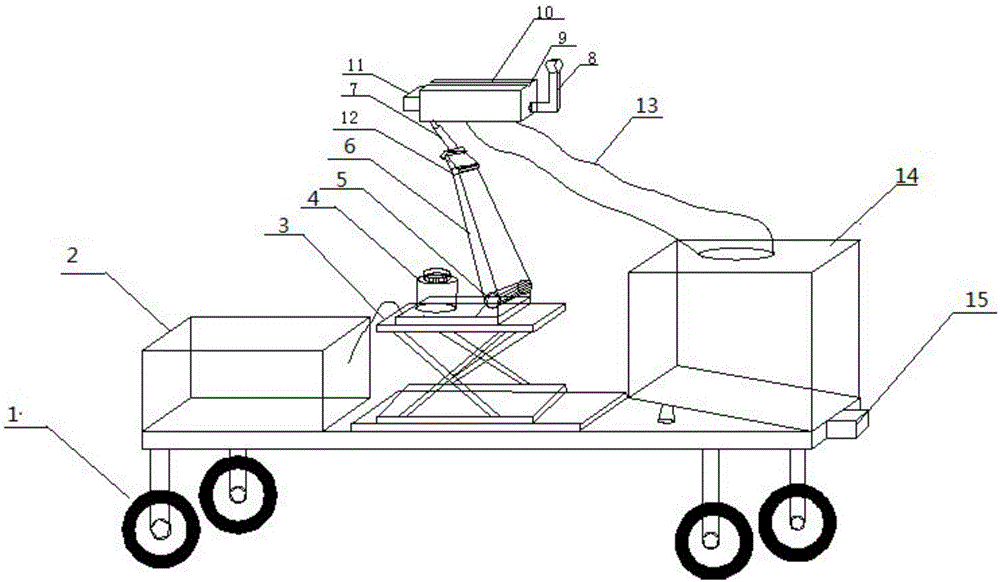
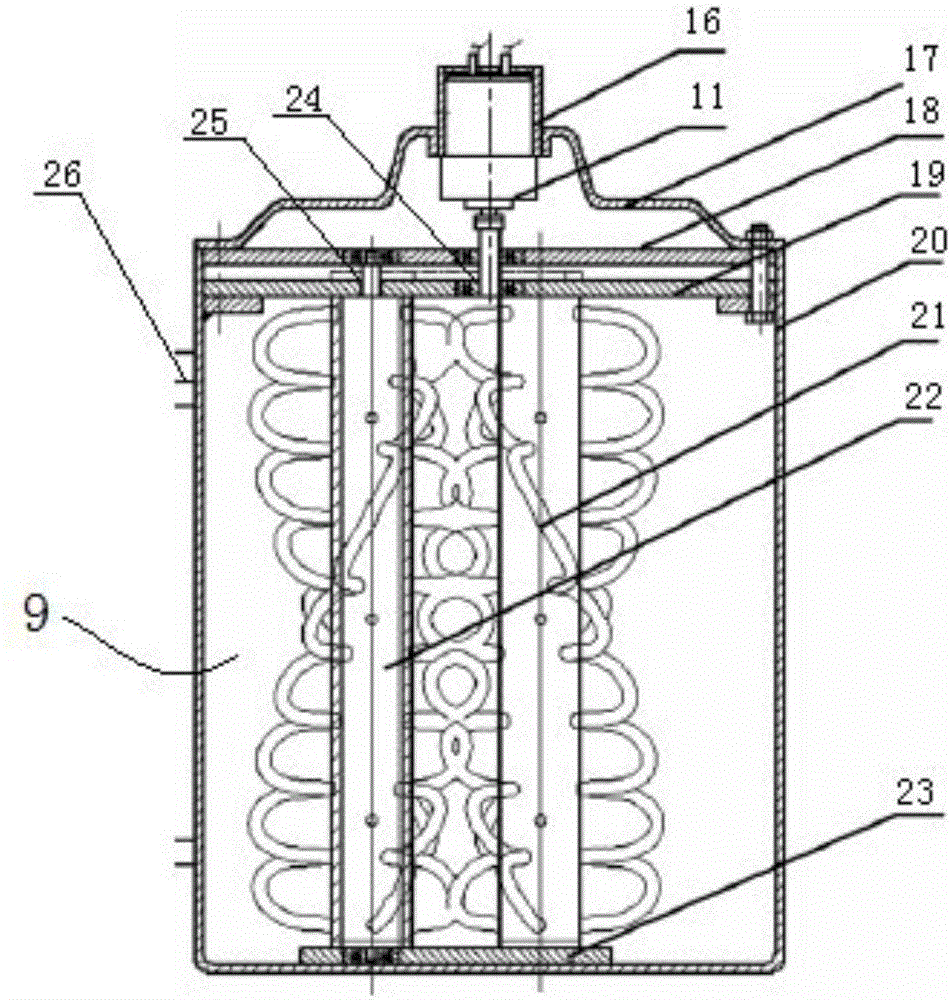
[0062] like figure 1 As shown, a wolfberry picking robot of the present invention includes a trolley 1; a power supply and a power control device 2 are disposed on one end of the trolley 1, a roadblock sensor 15 is disposed on the other end, and a mechanical arm is disposed on the top of the trolley 1. Mechanical arm comprises lifting platform 3, waist revolving joint, big arm 6, forearm 7 and prism joint connected successively, and lifting platform 3 is provided with waist motor 4, big arm 6 and big arm electric motor 5; The forearm 7 is connected, the upper end of the forearm 7 is connected with the picking head 9 through a prism joint, and the bottom of the forearm 7 is provided with a forearm motor 12; the waist motor 4 drives the rotation of the waist rotary joint, and the big arm m...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Lift height | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com