


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A multi-rotor unmanned aerial vehicle and telemetry and remote control method
A multi-rotor unmanned and aircraft technology, applied in the field of unmanned aerial vehicles, can solve problems such as flight abnormalities, difficulty avoiding obstacles, poor environmental adaptability, etc., and achieve the effects of ensuring transmission distance, avoiding accidents, and wide power supply range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
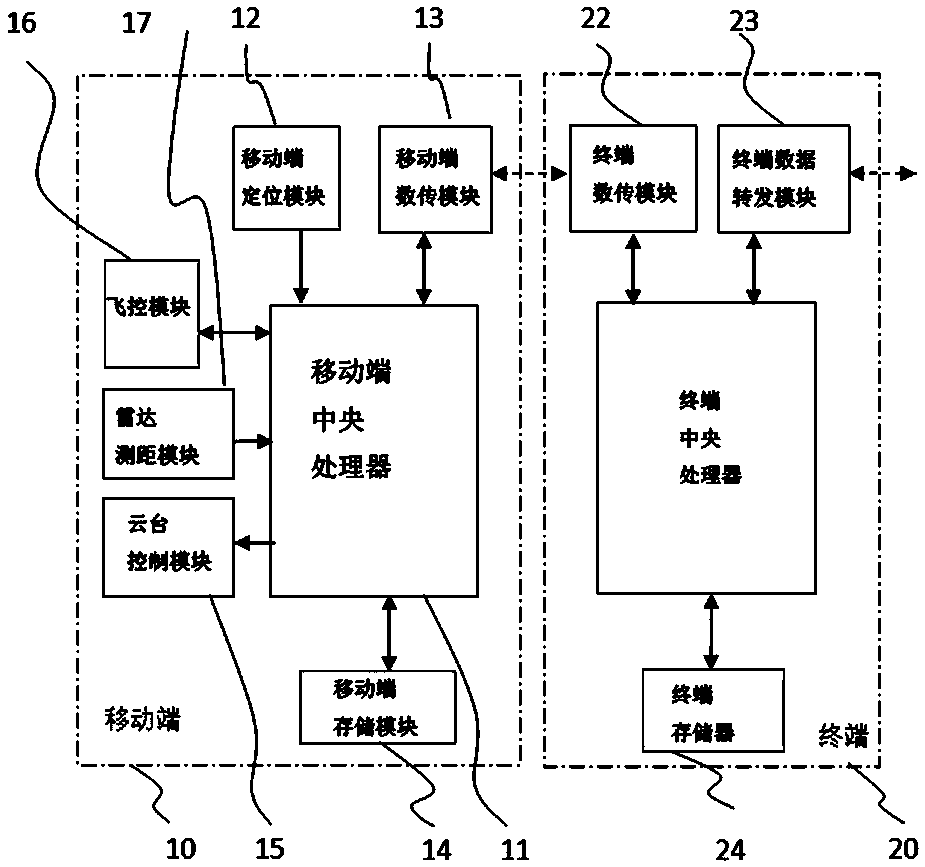
[0034] The present invention provides a method of simultaneously using GPS and the Beidou system to obtain positioning information, and adopting a method of storing historical positioning information to ensure that the positioning information of unmanned aerial vehicles is normal to the greatest extent. At the same time, when the positioning information is abnormal, the method of reading historical positioning information is adopted. Ensure that the aircraft can return to the starting position according to the historical trajectory when the positioning information is abnormal. The invention adds a radar ranging module to detect the distance between the unmanned aerial vehicle and obstacles in real time, and when a certain warning range is reached, the flight control module is notified to keep the unmanned aerial vehicle in a hovering state, effectively preventing the unmanned aerial vehicle from encountering obstacles There was an accident.
[0035] Now describe in detail the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com