Locomotive positioning method and system
A positioning method and positioning system technology, which is applied in satellite radio beacon positioning system, radio wave measurement system, railway signal and safety, etc., can solve the problem of inability to obtain LKJ position data, lack of real-time monitoring of trains, and poor timeliness of train operation information And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
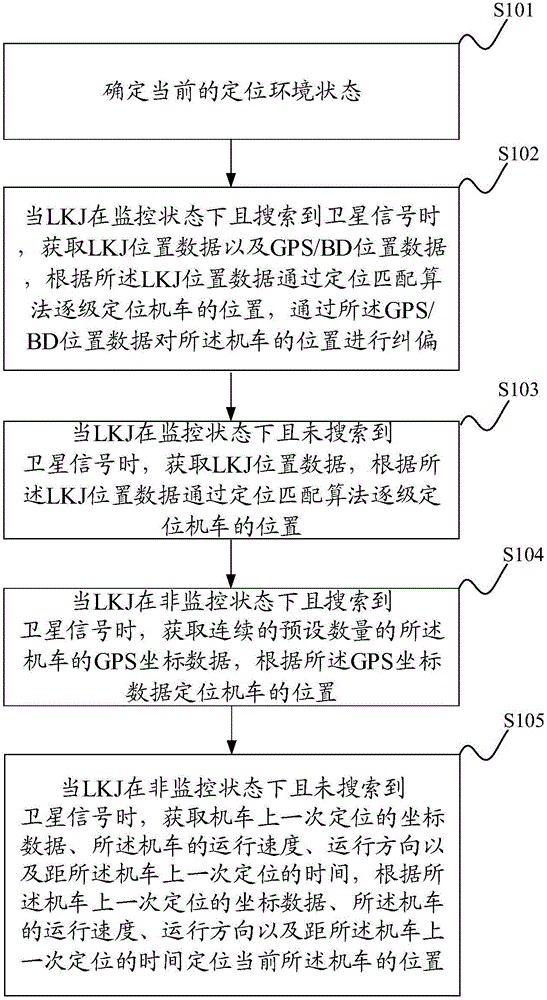
[0070] The invention provides a locomotive positioning method, figure 1 A flow chart of Embodiment 1 of the locomotive positioning method of the present invention is shown, including:
[0071] Step S101: Determine the current positioning environment state;
[0072] Determine whether the LKJ of the target locomotive that needs to be positioned is currently under monitoring, and whether the vehicle-mounted GPA / BD positioning device can search for satellite signals for GPS / BD positioning. GPS / BD positioning is a positioning method compatible with GPS positioning and Beidou positioning.
[0073] Step S102: When the LKJ is in the monitoring state and the satellite signal is searched, obtain the LKJ position data and the GPS / BD position data, and use the location matching algorithm to locate the position of the locomotive step by step according to the LKJ position data, and use the GPS / BD The position data corrects the position of the locomotive;
[0074] When the LKJ is in the mo...
Embodiment 2
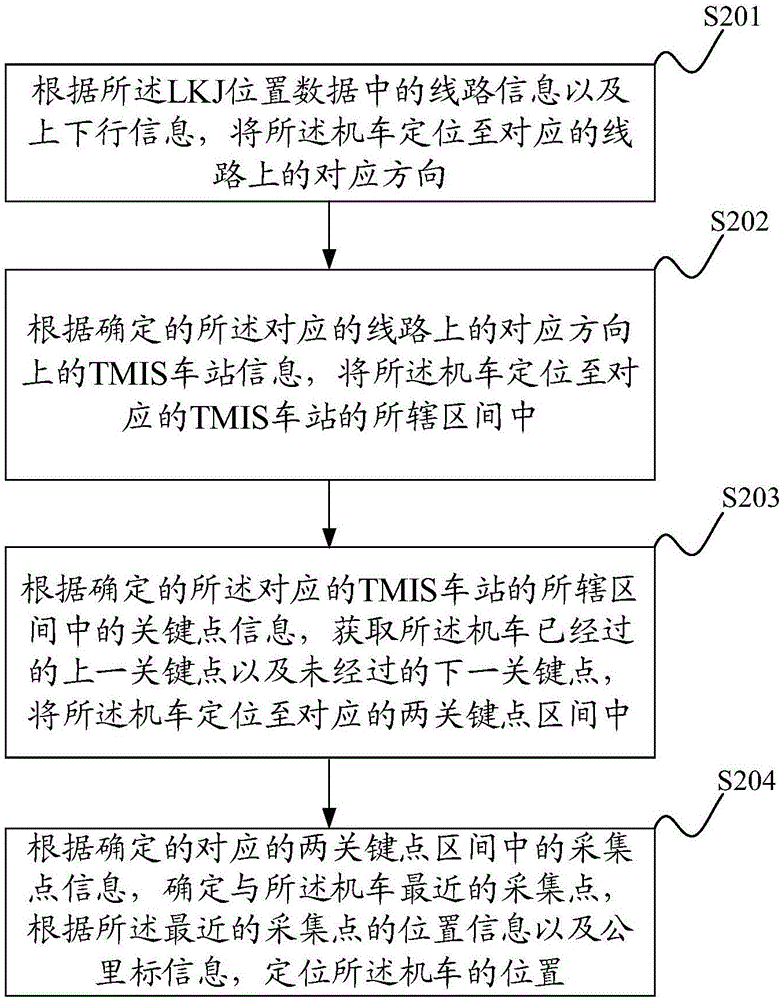
[0084] image 3 The flow chart of Embodiment 2 of the present invention is shown, and corresponding to Embodiment 1, locating the position of the target locomotive step by step through the positioning matching algorithm according to the position data of the target LKJ specifically includes:
[0085] Step S201: According to the line information and uplink and downlink information in the LKJ position data, locate the locomotive to the corresponding direction on the corresponding line;
[0086] Step S202: According to the determined TMIS station information in the corresponding direction on the corresponding line, locate the locomotive in the area under the jurisdiction of the corresponding TMIS station;
[0087] Step S203: According to the determined key point information in the area under the jurisdiction of the corresponding TMIS station, obtain the last key point that the locomotive has passed and the next key point that has not passed, and locate the locomotive to the corres...
Embodiment 3
[0091] Figure 6 The flow chart of Embodiment 3 of the present invention is shown, corresponding to Embodiment 1, correcting the position of the target locomotive through the target GPS / BD position data specifically includes:
[0092] Step S301: When the position deviation of the locomotive exceeds the preset range, according to the determined collection point information in the corresponding two key point intervals and the current position information of the locomotive in the GPS / BD position data, Calculate respectively the distance between each collection point in the corresponding two key point intervals determined and the locomotive;
[0093]In the LKJ state, a signal can be uniquely determined by the line number, station number, uplink and downlink, and signal number; the formula for calculating the distance between two points: the GPS point coordinates are (MLonA, MLatA), and the collection point coordinates are (MLonA, MLatA) , the distance between two points:
[0094...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com