Combination method of multi-coordinate machining center based on vision and moving manipulator
A technology of mobile manipulator and combination method, which is applied in the field of machinery and information, and can solve problems such as the inability to directly combine multi-coordinate machining centers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
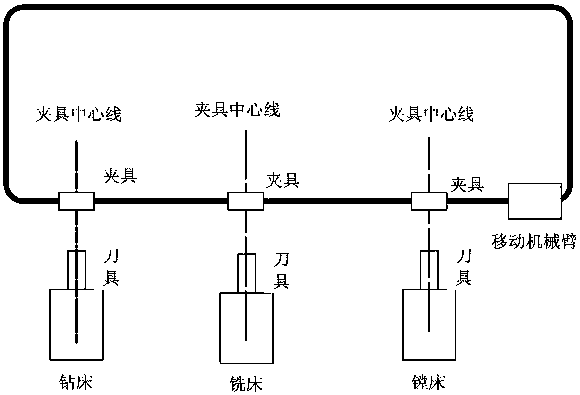
[0022] refer to figure 1 .
[0023] (1) Set processing tasks and procedures on the mobile manipulator, boring machine, milling machine, and drilling machine; set the track of the mobile manipulator so that the mobile manipulator can move on the track; arrange boring machines, milling machines, Drilling machine, so that the boring machine, milling machine, and drilling machine tool face the track of the mobile manipulator and are perpendicular to the track. The vertical line perpendicular to the track of the mobile manipulator is used as the centerline of the fixture of the mobile manipulator. When the centerline of gravity of the mobile manipulator and the first processing When the centerlines of the jigs in front of the boring machine, milling machine or drilling machine in the process intersect, the moving mechanical arm stops moving and is locked by the jigs. After multi-coordinate alignment and accurate positioning, the processing is carried out, and the accumulated errors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com