Depth image partitioning and agent geometry based virtual and real collision interaction method and apparatus
A geometry and depth map technology, applied in the field of augmented reality, to achieve the effect of good application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
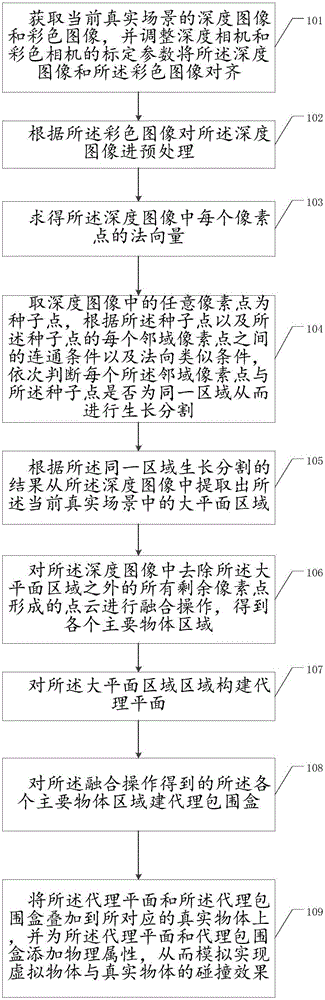
[0034] Such as figure 1 As shown, the scene segmentation based on the depth image of the present application further includes the following steps:
[0035] Step 101: Obtain the depth image and color image of the current real scene, and adjust the calibration parameters of the depth camera and the color camera to align the depth image and the color image;
[0036] In this embodiment, Kinect is used to acquire color image information and depth image information of the current real scene. Kinect is a device developed by Microsoft for somatosensory interaction. It can obtain the depth information of the captured scene through an infrared camera, so as to complete the recognition and tracking of human body movements and realize somatosensory interaction. Kinect has pre-calibrated the depth camera and the color camera before leaving the factory, and provides the internal and external parameters of the two cameras, so that the calibration and alignment of the depth image and the col...
Embodiment 2
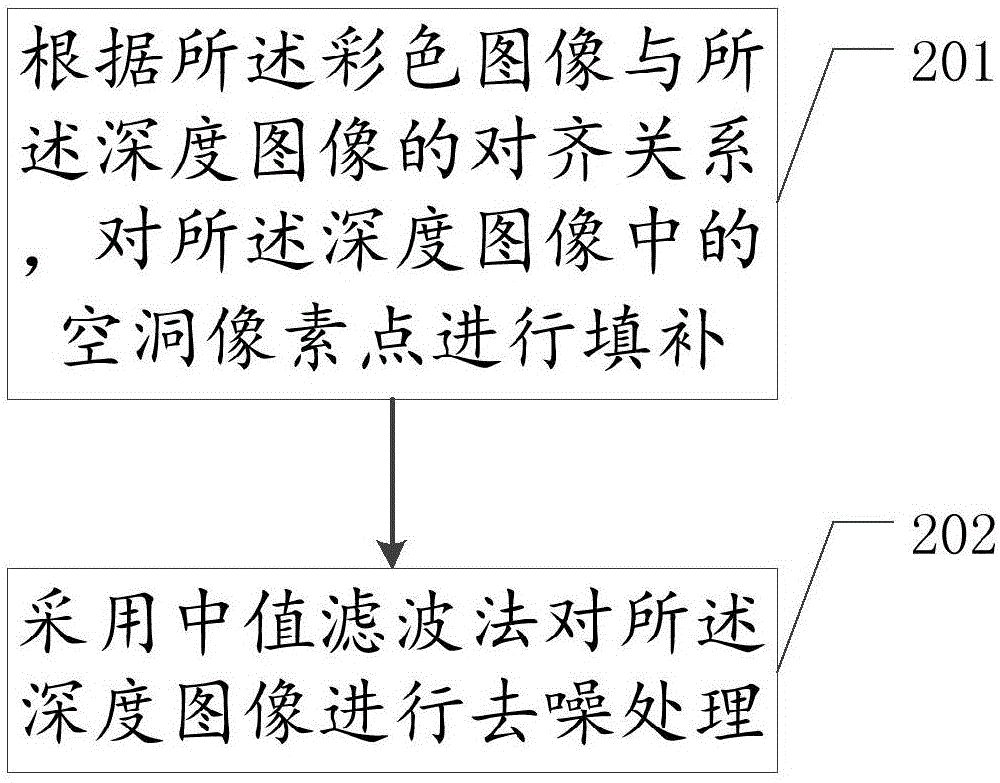
[0055] combine figure 2 As shown, in the embodiment of the present invention, the preprocessing of the depth image according to the color image further includes the following steps:
[0056] Step 201: According to the alignment relationship between the color image and the depth image, fill the hole pixels in the depth image, and search for the color pixels around the color pixels corresponding to the hole pixels For the pixel with the most matching color, the depth value of the most matching pixel is used as the depth value of the hole pixel.
[0057] In the processing process, the RGB image obtained by Kinect, that is, the color image, is used to fill the hole area. Although the hole position has no depth value, the RGB color information of the pixel corresponding to the hole position is known, so in the RGB image, according to the RGB color of the pixel point corresponding to the hole position, find the most matching color around the hole position pixel, and use the depth...
Embodiment 3
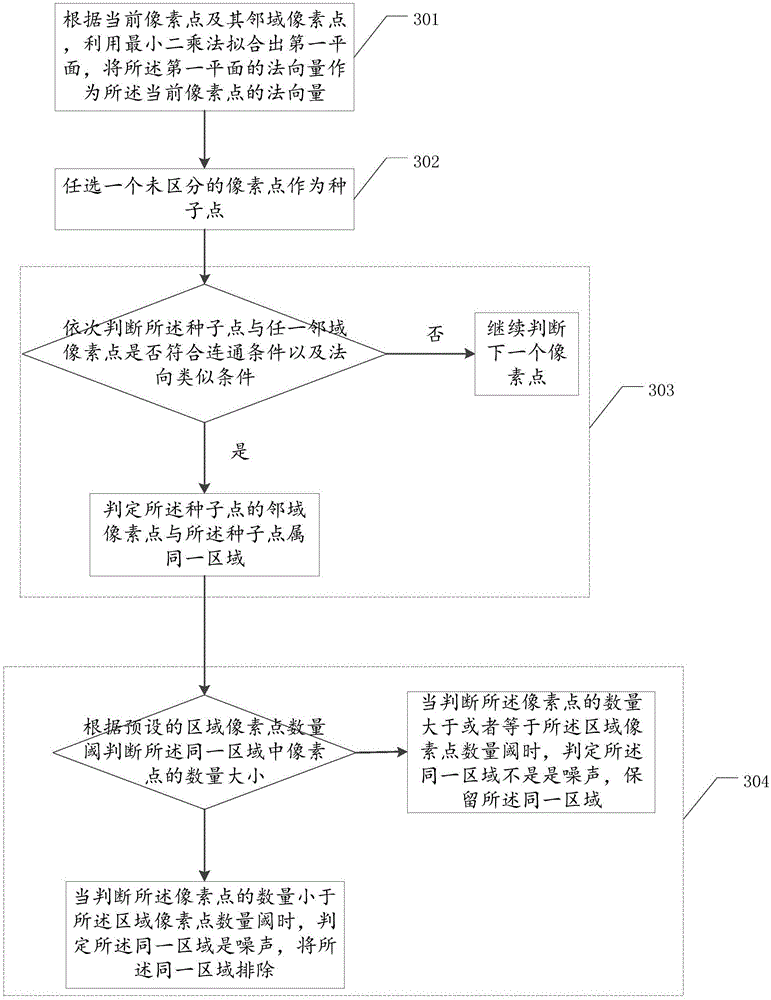
[0062] combine image 3 As shown, in the embodiment of the present application, the obtained depth image of the real scene is segmented by using the region growing method, which further includes the following steps:
[0063] Step 301: According to the current pixel point and its neighboring pixels, use the least squares method to fit a first plane, and use the normal vector of the first plane as the normal vector of the current pixel point.
[0064] In the embodiment of the present application, the local surface fitting method is used to obtain the normal direction: assuming that the surface of the sampled point cloud is smooth everywhere, a plane can be fitted by the least square method according to the neighborhood of the current pixel point, and the plane's The normal is used as the normal vector of the current pixel.
[0065] The least square method, also known as the least square method, is a mathematical optimization technique that finds the best function match for the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com