TR element locating and defect detecting method based on vision
A defect detection and component technology, applied in the direction of optical testing flaws/defects, etc., can solve problems such as poor real-time performance, human error, and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0075] Specific implementation mode 1: The vision-based TR component positioning and defect detection method of this embodiment is specifically prepared according to the following steps:
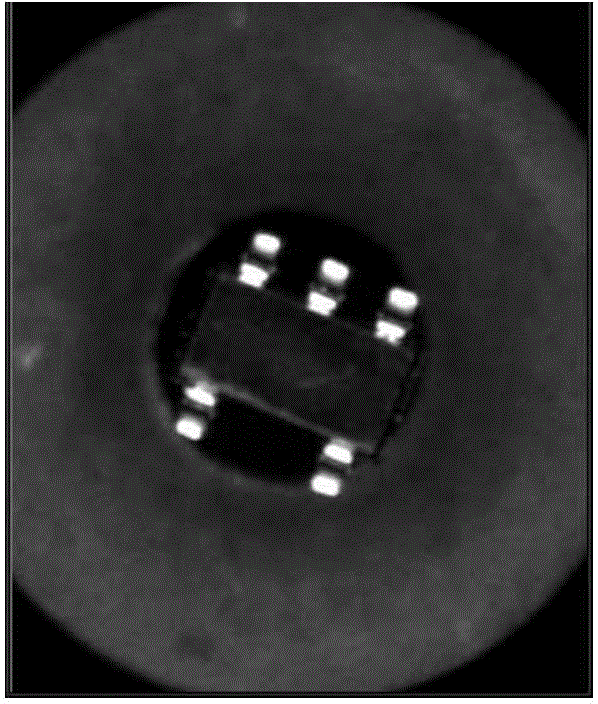
[0076] Step 1. Check the selected area image ( figure 1 ) Brightness; if the image appears too bright or too dark, stop checking and return the corresponding error code; if the ratio of the number of bright spots to the total number of dots is in the interval [0.01, 0.90], go to step 2; where the pixel value in the selected area image 255 pixels are regarded as bright spots, and the number of all pixels in the selected area image is recorded as the total number of points; when the ratio of the number of bright spots to the total number of points is less than 0.01, the area image is considered too dark, and when the ratio of the number of bright spots to the total number of points is greater than 0.90, it is considered The area image is too bright;
[0077] Step 2: Binarize the image with the rat...
specific Embodiment approach 2
[0125] Specific embodiment two: this embodiment is different from specific embodiment one in that in step two, the ratio of the number of bright spots to the total number of points in the selected area image is binarized to obtain a binarized image There are two specific implementation methods:
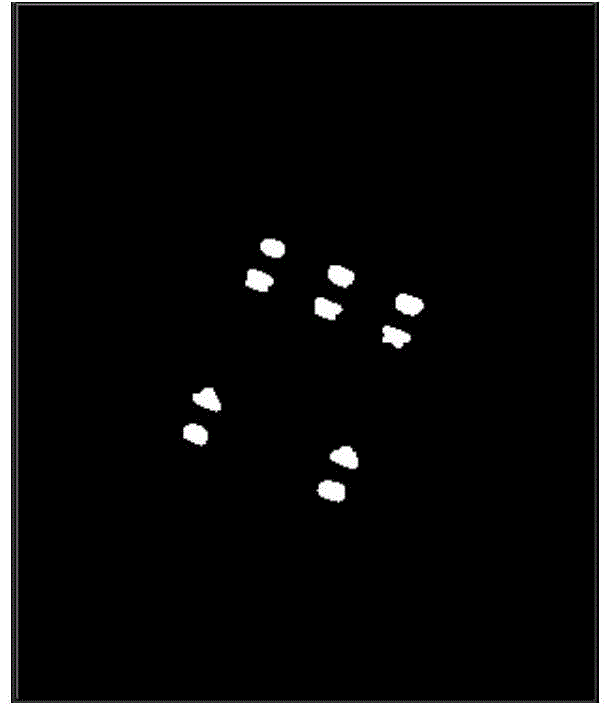
[0126] The first is to manually input the fixed threshold binarization method, that is, set the pixel value greater than or equal to the input threshold to 255, and set the pixel value less than the input threshold to 0, and get the manual input fixed threshold binarization method. Binary image such as figure 2 ;
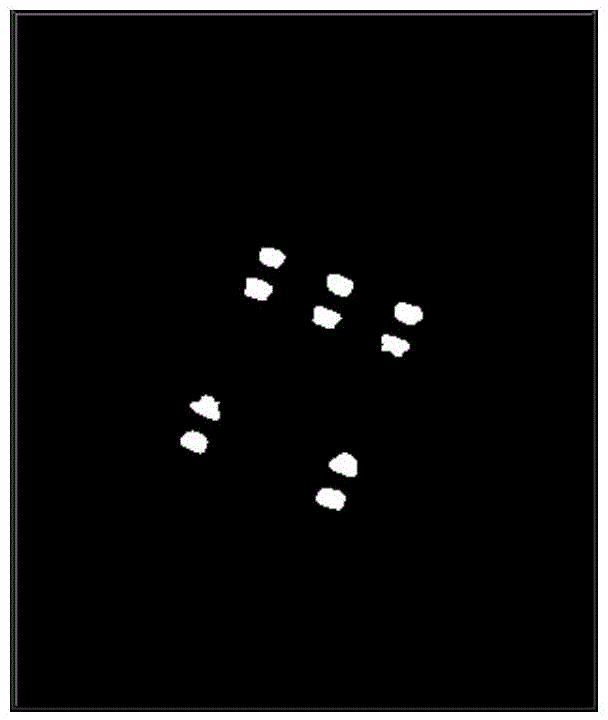
[0127] The second method is the method with the largest variance between classes (Otsu method or Otsu method) to obtain a binary image obtained by the method with the largest variance between classes, such as image 3 ;
[0128] Manually enter the binarized image obtained by the fixed threshold binarization method and the binarized image obtained by the method with the largest v...
specific Embodiment approach 3
[0129] Specific embodiment three: this embodiment is different from specific embodiment one or two in that in step seven, the effective boundary point set obtained in step four is divided into the upper effective boundary point set of the TR element and the lower effective boundary point set of the TR element according to α. The classification methods for the two groups are:
[0130] (1) If the rough rotation angle α of the component obtained in step 5 is outside plus or minus 30 degrees, it will stop, and an error code indicating that the rotation angle is too large will be output. If α is within the range of plus or minus 30 degrees, proceed to step (2) ;
[0131] (2) The unit vector pointing to the effective boundary point set of the lower part of the TR element is obtained by the rough rotation angle α of the TR element a → = ( - s i n α , c o s α ) ;
[0132] (3) Take the rough center of the TR element (x 0 ,y 0 ) Is the starting point, p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com