Quadruped robot with parallel waist structure
A quadruped robot, parallel technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of inability to achieve fast movement and flexible obstacle surmounting, less freedom of waist, lack of waist structure, etc., to achieve fast and dexterous movement, The effect of overcoming the difficulty of speed increase and strong carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
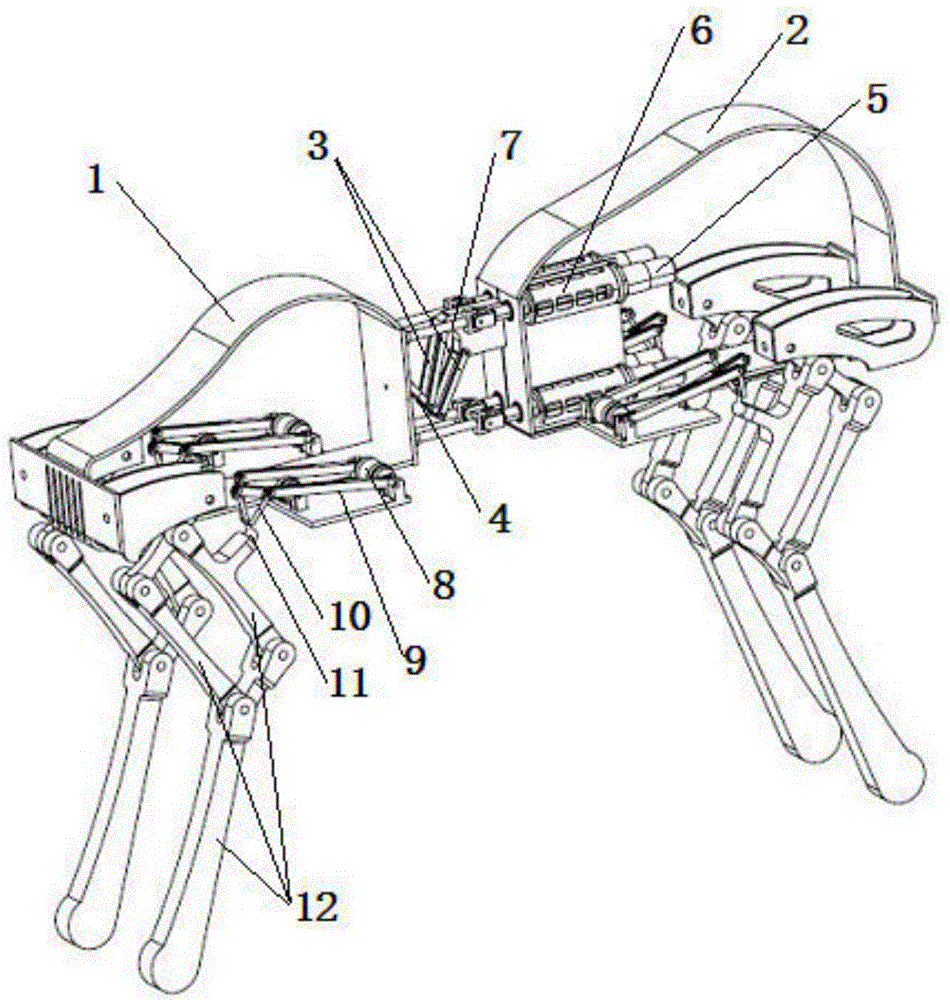
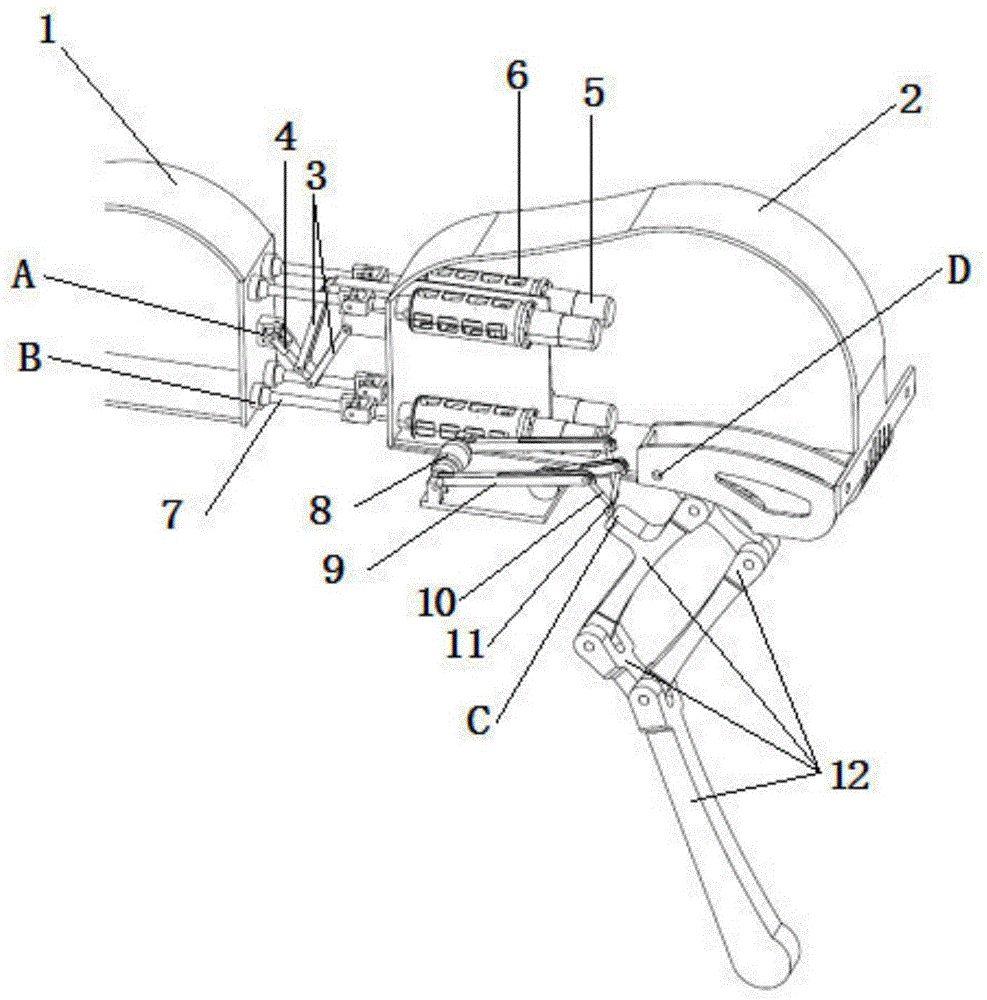
[0027] This embodiment provides a quadruped robot with a parallel waist structure, including a frame, a parallel waist structure and four parallel mechanical legs. The frame includes a front frame and a rear frame, and the front frame and the rear frame are connected through a parallel waist structure. The four parallel mechanical legs are evenly installed on both sides of the front frame and the rear frame, and each mechanical leg has three degrees of freedom relative to the frame.
[0028] According to a preferred embodiment of the present invention, the parallel waist structure is a parallel mechanism with four degrees of freedom, including an auxiliary branch chain and four identical main branch chains distributed around it. The auxiliary branch chain includes two connecting rods and an output rod. One end of the connecting rod is hinged on the rear frame, and the other end is hinged on the output rod. The output rod is connected to the front frame through an equivalent ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com