Mechanical structure and walking method of a three-dimensional humanoid biped walking robot
A walking robot and mechanical structure technology, applied in the field of robots, can solve the problems of complex control principle and large energy consumption of the robot, and achieve the effect of avoiding yaw and reducing the degree of freedom of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing, further elaborate the present invention.
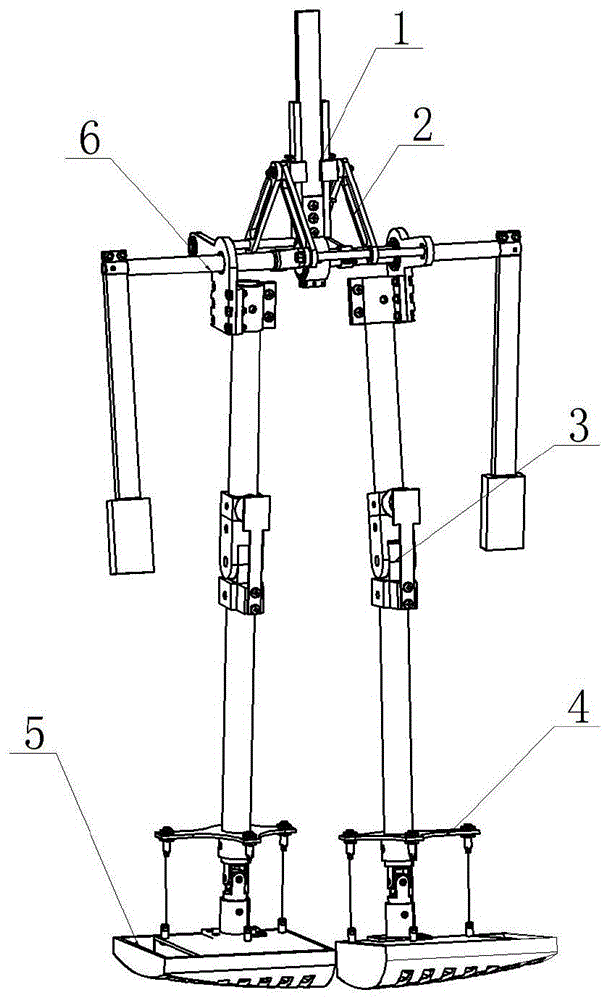
[0043] Such as figure 1 As shown, the structure of the mechanical body of the present invention can be divided into six parts according to functions: the trunk 1, the angle bisecting mechanism 2, the knee joint 3, the ankle joint 4, the sole 5, and the arm-thigh coupling mechanism 6.
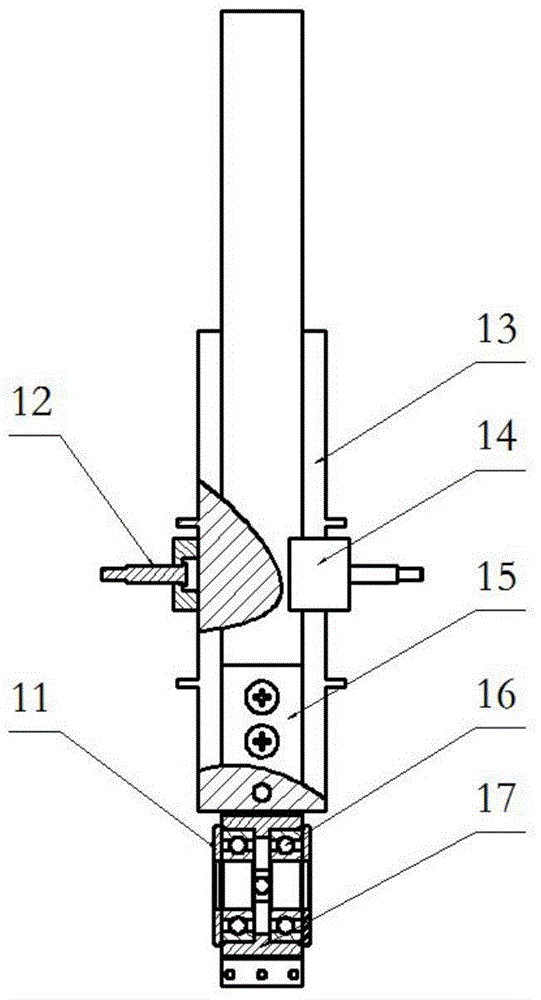
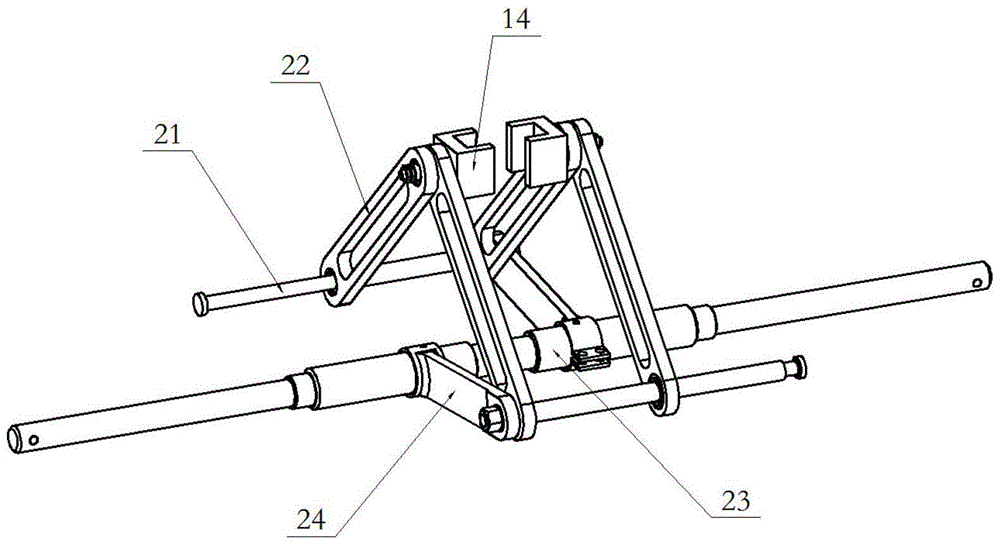
[0044] Such as figure 2As shown, the trunk 1 is mainly composed of a bearing retaining ring 11, a semi-fixed ring 15, a connecting shaft 12, a slide block 14, a body 13, a connecting ring 17, a bolt 13, and a bearing 16. The slider 14 can slide on the body 13 and is connected by connecting the shaft 12 and the connecting rod 22 of the angle bisecting mechanism. The semi-fixed ring 15 fixes the body and the connecting ring by bolts, and the bearing retaining ring 11 is used to limit the axial movement of the bearing in the connecting ring 17 . Such structural design can allow the torso 1 to rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com