


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Fully autonomous flight control system for quadrotor unmanned aerial vehicles based on external vision
A quadrotor aircraft and flight control system technology, applied in attitude control, three-dimensional position/course control, etc., can solve the problems of lack of intuitiveness in flight data processing, lack of fully autonomous flight control capabilities, etc., and achieve the effect of rapid discovery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
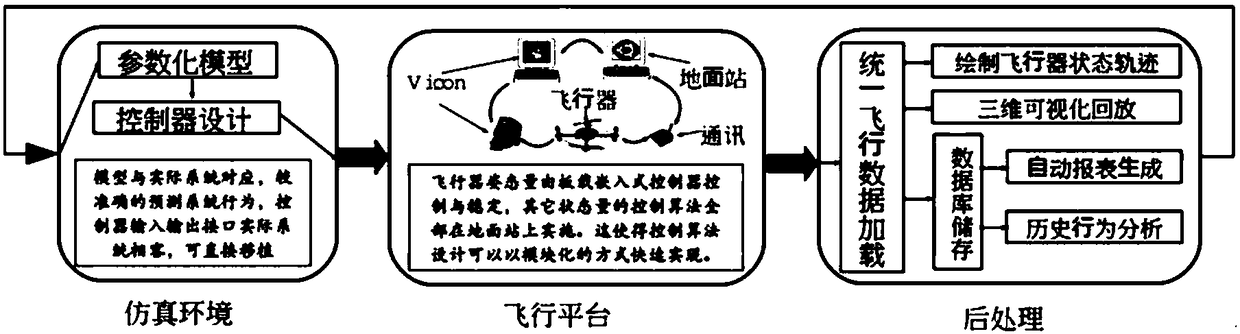
[0018] Step 1. Press figure 1 In the structure shown in the block diagram, in a certain indoor space (such as 5x5x3.5 meters), the VICON visual positioning system with more than 8 cameras is arranged around it. At the same time, it is equipped with a PC computer, a programmable quadrotor aircraft and a pair of wireless communication module XBee.
[0019] Step 2. Connect the XBee to the serial port of the quadrotor and the serial port of the PC respectively. Develop a communication protocol between the quadrotor and the PC. The content of the agreement is as figure 2 shown.
[0020] Write the communication program corresponding to the quadrotor aircraft and the PC terminal according to the content of the communication protocol.
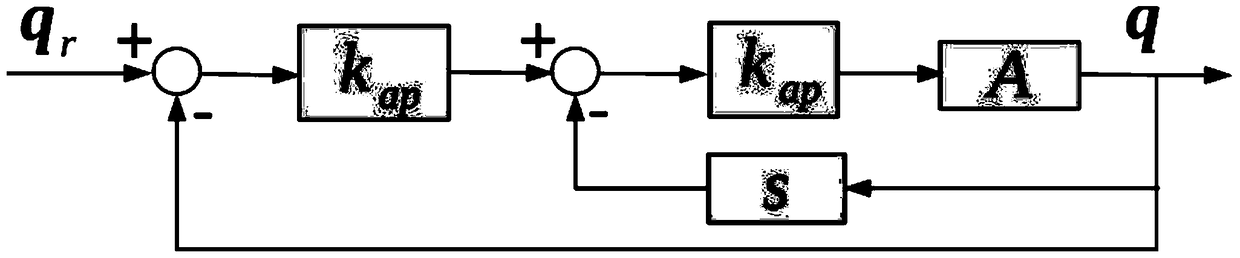
[0021] Step 3. Write the attitude controller of the quadrotor aircraft. The attitude controller adopts P-D control algorithm. The structure of the control algorithm is as image 3 shown.
[0022] Also used as image 3 The P-D control structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com