Night viewing image noise reduction method for apple harvesting robot
A picking robot and image noise reduction technology, applied in image enhancement, image data processing, instruments, etc., can solve problems such as insufficient light, night vision image noise, etc., and achieve the effect of reducing noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The specific embodiment of the present invention will be further described below in conjunction with the accompanying drawings, and the specific flow chart is as follows Figure 8 shown.
[0042] 1. Apple night vision image collection
[0043] The present invention adopts a color CCD camera, uses an incandescent lamp as an artificial light source, and continuously collects two images at the same sampling point at the same angle, such as figure 1 shown in a and 1b.
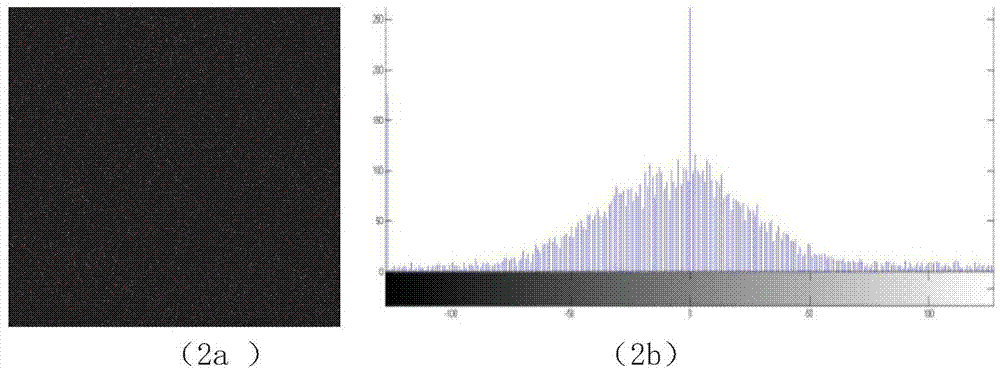
[0044] 2. Apple night vision image noise type determination
[0045] Preliminary judgment is made based on the type of noise contained in the two night vision images, and the noise is mixed noise. It can be directly judged that some of them are salt and pepper noise visually, but the rest of the noise cannot be judged visually.
[0046] In this example, the subtraction method is used to determine other types of noise contained in the collected images. The main principle is that under the same sampling e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com