Driving mechanism for multi-degree-of-freedom flexible robot for single-incision laparoscopic minimally invasive surgery
A minimally invasive surgery and driving mechanism technology, applied in the field of surgical robots, can solve the problems of large overall size and low overall integration of robot driving mechanisms, and achieve the effects of reduced size and weight, ingenious design structure, and easy portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
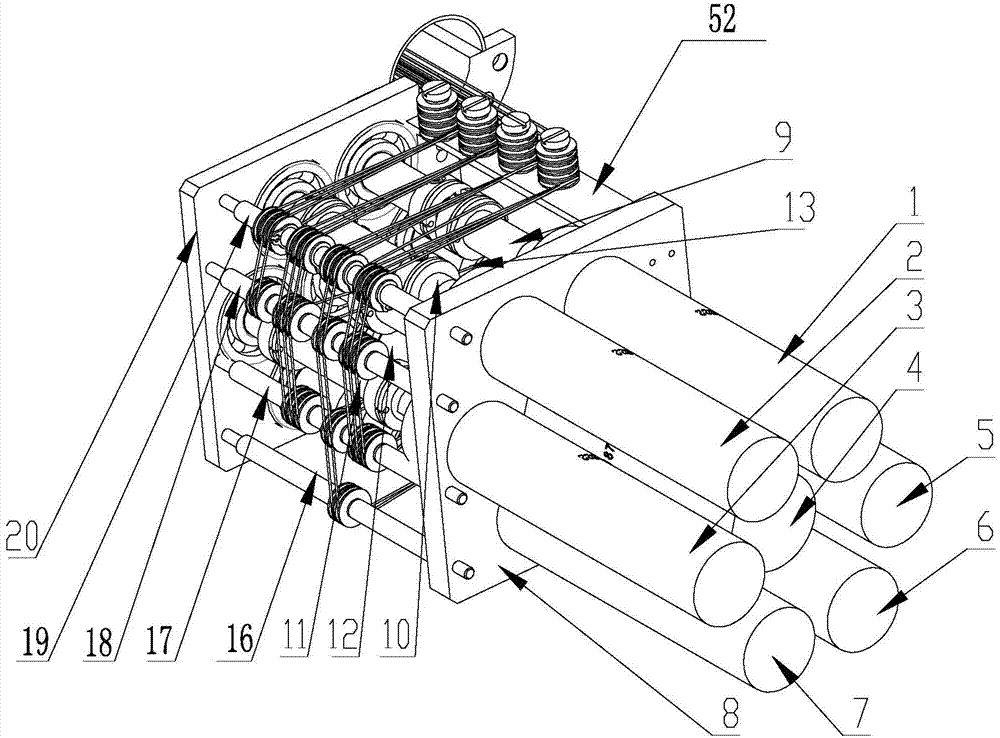
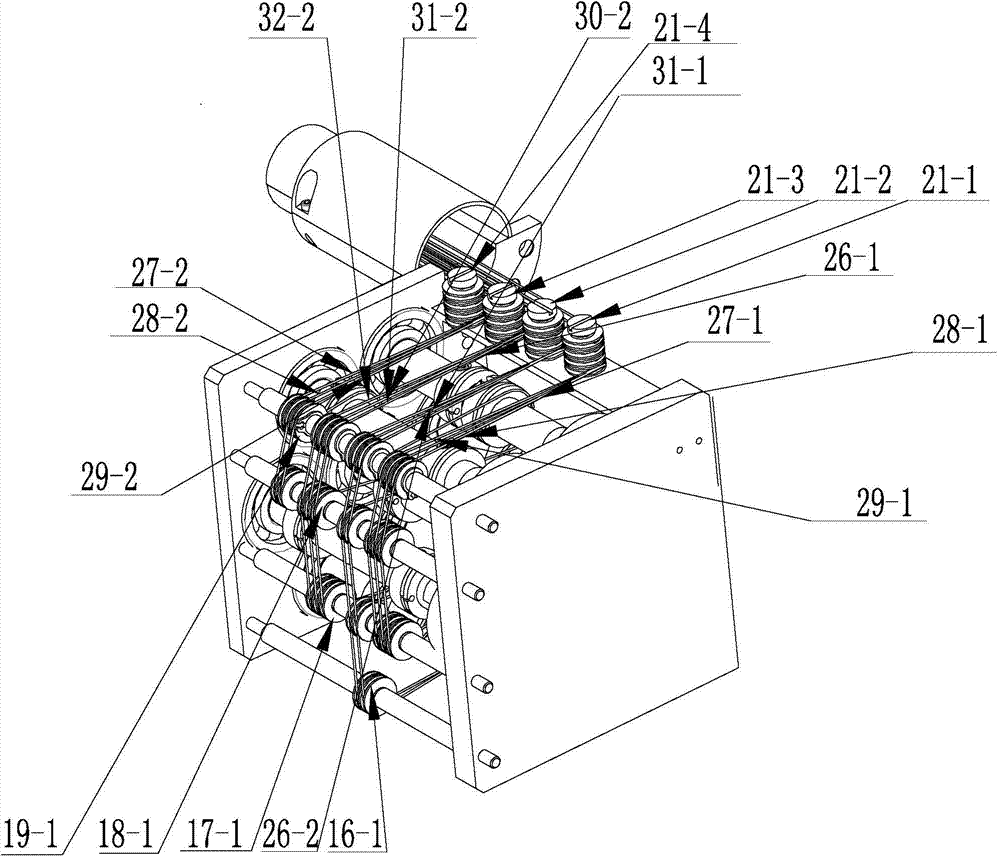
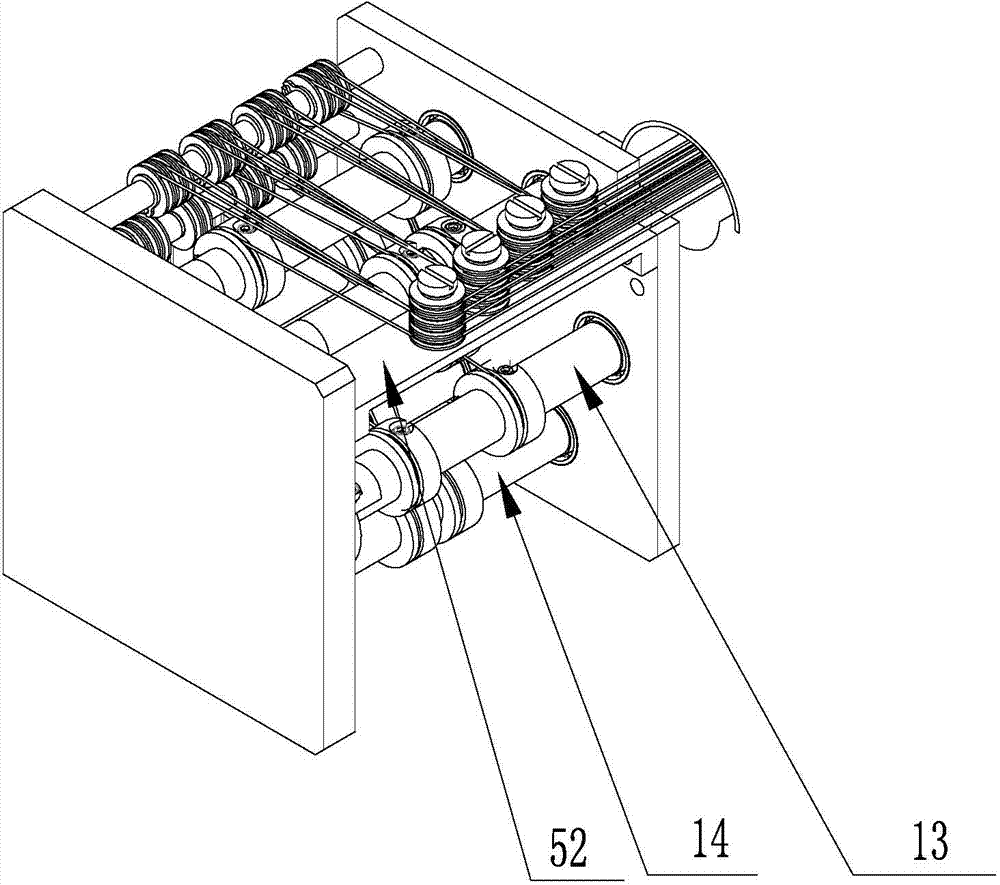
[0012] Embodiment 1: Combining figure 1 , figure 2 and image 3 Describing this embodiment, the mechanism of this embodiment includes a first motor 1, a second motor 2, a third motor 3, a fourth motor 4, a fifth motor 5, a sixth motor 6, a seventh motor 7, and a rear support of the drive box Plate 8, first motor output shaft 9, second motor output shaft 10, third motor output shaft 11, fourth motor output shaft 12, fifth motor output shaft 13, sixth motor output shaft 14, seventh motor output shaft 15. The first drive wire guide shaft 16, the second drive wire guide shaft 17, the third drive wire guide shaft 18, the fourth drive wire guide shaft 19, the front end support plate 20 of the drive box, the first flexible arm guide wheel group 21- 1. The second flexible arm guide wheel set 21-2, the third flexible arm guide wheel set 21-3, the fourth flexible arm guide wheel set 21-4,
[0013] The first motor 1, the second motor 2, the third motor 3, the fourth motor 4, the fift...
specific Embodiment approach 2
[0018] Specific implementation mode 2: Combining figure 1 Describing the present embodiment, the length, width and height of the drive case of the present embodiment are all 80 mm. Other embodiments are the same as the first embodiment.
specific Embodiment approach 3
[0019] Specific embodiment 3: The first driving wire guide shaft 16 of this embodiment is provided with two first winding wheels 16-1, which are respectively defined as the first winding wheel 1 and the first winding wheel 2. The first winding wheel 16-1 is The first reel and the second reel are abutted together to form a first reel set. Other embodiments are the same as the first embodiment.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Height | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com