A quasi-passive biped walking robot system with hip vibrator
A walking robot and robot system technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of poor system reliability, high energy consumption, unnatural gait of active robots, etc., and achieve stable three-dimensional walking, natural gait, The effect of low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
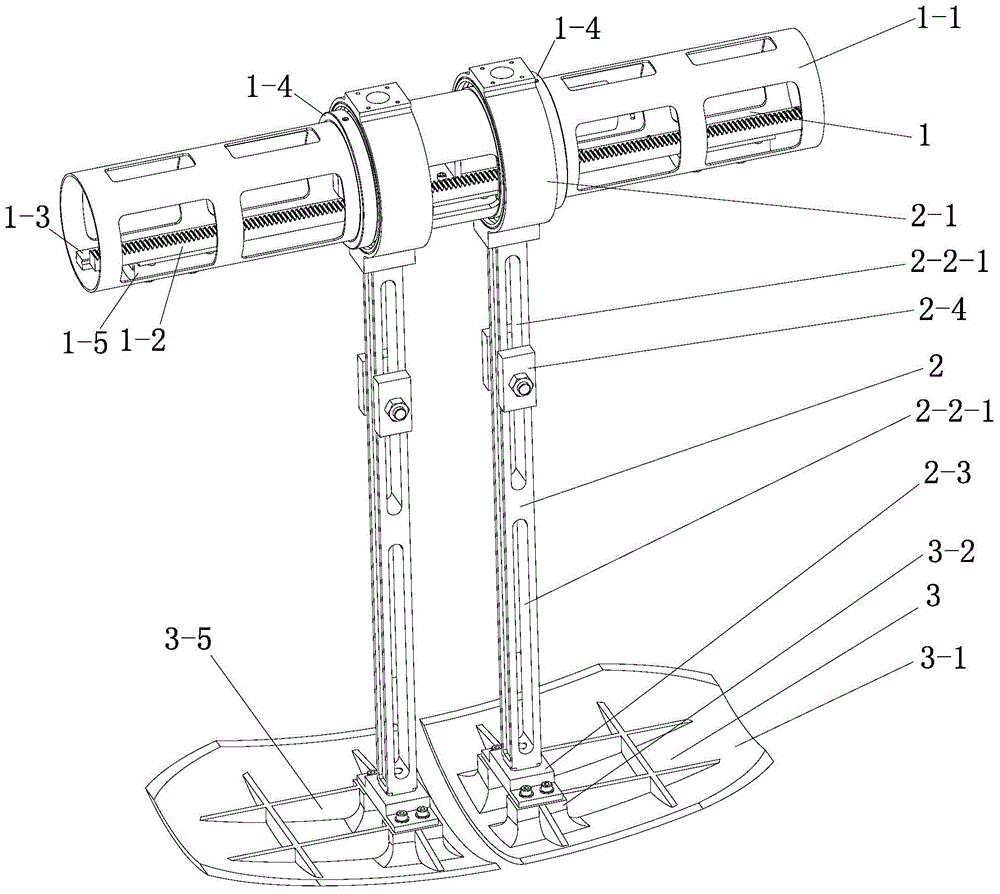
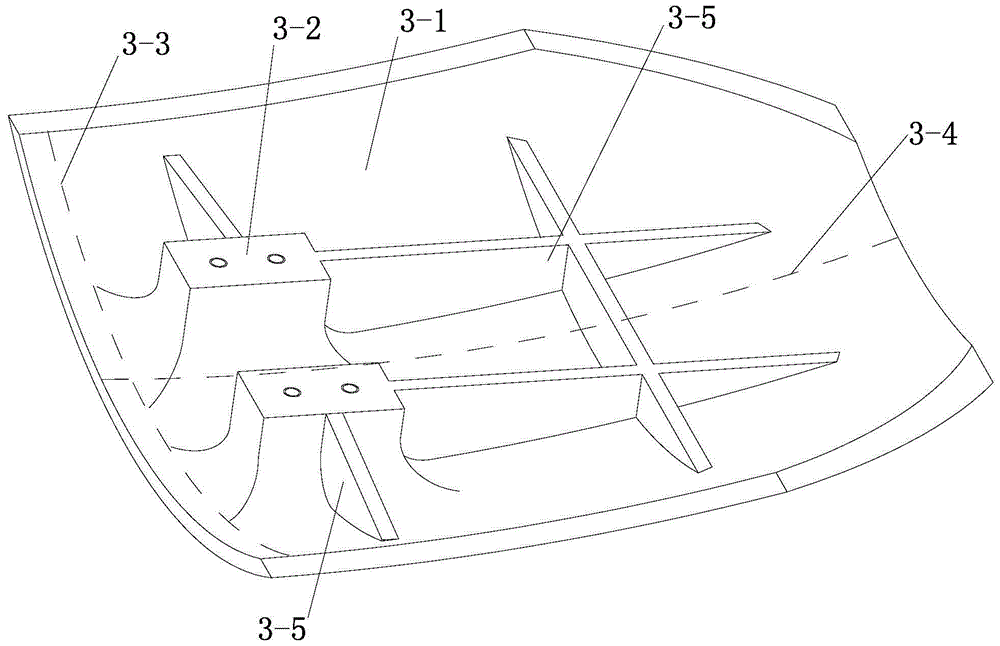
[0021] Specific implementation mode one: combine Figure 1-Figure 4 Explain that a quasi-passive biped walking robot system with a hip vibrator in this embodiment includes a hip assembly 1, two leg assemblies 2 and two foot assemblies 3, a hip assembly 1 and two A leg assembly 2 is arranged between the foot assemblies 3;
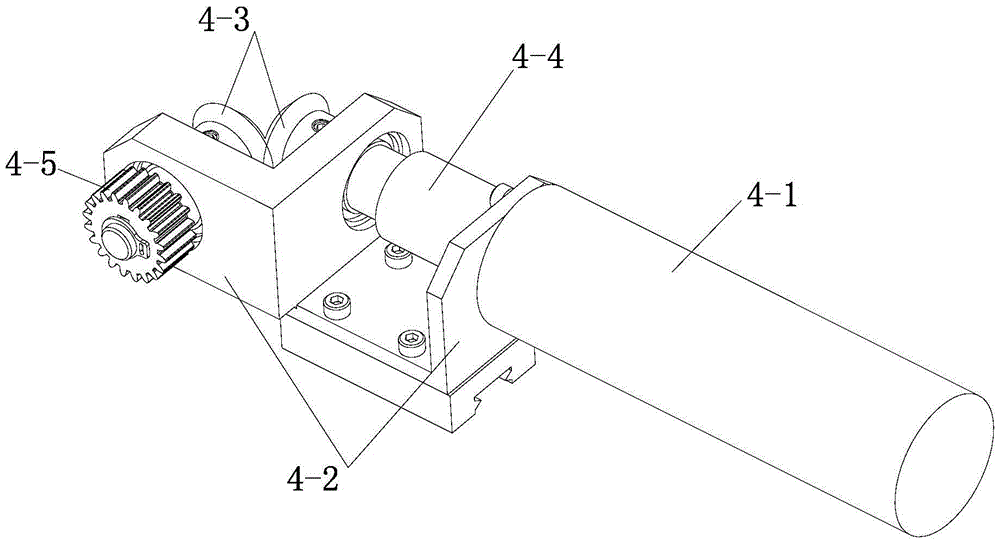
[0022] The robot system also includes a hip vibrator 4, and the hip vibrator 4 includes a reduction motor 4-1, a support 4-2, a bevel gear pair 4-3, a coupling 4-4 and an output gear 4-5;
[0023] The hip assembly 1 includes a cylinder 1-1, a rack 1-2, a guide rail 1-3 and two annular connectors 1-4; the cylinder 1-1 is fixed along the length direction of the cylinder 1-1 There are guide rails 1-3 and racks 1-2, and two annular connectors 1-4 arranged side by side are installed on the outer surface of the cylinder 1-1 along the circumference of the cylinder 1-1, and the geared motor 4-1 is installed On the support 4-2, the support 4-2 is slidably install...
specific Embodiment approach 2
[0028] Specific implementation mode two: combination figure 1 with Figure 4 Note that the ring-shaped connector 1-4 in this embodiment is a threaded sleeve, and the threaded sleeve 1-4 is screwed on the outer surface of the cylinder 1-1. In this way, the threaded sleeve enables the leg assembly to be fixed in the circumferential direction of the hip. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0029] Specific implementation mode three: combination figure 1 with Figure 4 Note that the hip-leg connector 2-1 of this embodiment is a bearing sleeve, and the bearing sleeve is mounted on the outer surface of the threaded sleeve through bearing rotation. With such an arrangement, the straight leg can rotate around the bearing sleeve when swinging, which is beneficial to the swing of the straight leg and enables it to give full play to its passive performance. Others are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com