Positive solution determining method of three-connecting-rod type parallel-structured robot
A determination method and three-link technology, applied in instruments, special data processing applications, electrical and digital data processing, etc., can solve problems such as difficulty in solving explicit analytical expressions, failure to solve, and omission of real solutions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described below in conjunction with the accompanying drawings and specific embodiments.
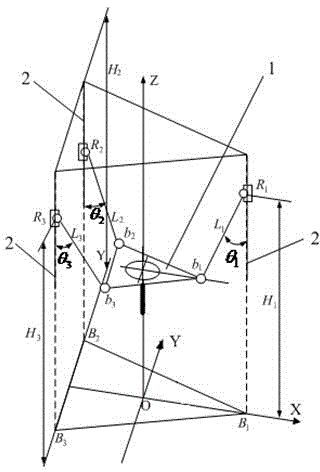
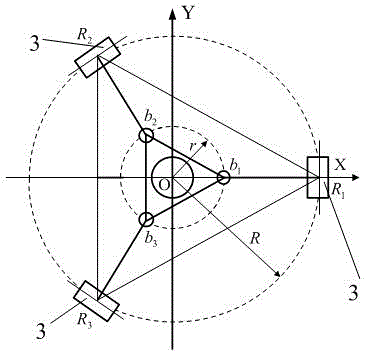
[0051] Such as figure 1 , 2 As shown, the fixed coordinate system OXYZ is established on the base fixed to the three columns 2, and the coordinate origin O is placed in the triangle The center of the X-axis passes through the point , along the Y axis direction. three connecting rods , , is of length , , , the angles between the three connecting rods and the three columns 2 are respectively , , . then three spherical hinges , , The coordinates of can be expressed in vector form as
[0052]
[0053] (1)
[0054]
[0055] by three spherical hinges is a regular triangle, so
[0056] (2)
[0057] According to formula (2), the three included angles can be obtained , , , substituting the three angles into formula (1) to get , , The coordinates o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com